Du har fått litt bakgrunn og er ferdig med byggetrinn 1. Så nå er det på tide å få quadkopteret i luften.
Vi fortsetter i kjent NRKbeta-stil og kommer til å oppdatere denne artikkelen også etter hvert som dere hjelper oss å samle erfaring.

Om du har fulgt vår byggelogg har du nå et quadkopter med ramme av furu og kryssfiner, understell av isopor eller kleshengere, fire motorer, fire hastighetskontrollere, KK-kontroller, batteri og batterialarm.

Motorene er koblet til sukkerbiter som igjen er koblet til hastighetskontrollerne. De er igjen koblet i hver sin sukkerbit med en svart leding for minus og en rød ledning for pluss. Men der stopper det.
Nå skal du koble alt sammen og konfigurere det hele. Først lager vi strømfordeling. Det du skal gjøre er ikke spesielt komplisert. Du skal koble sammen fire svarte ledninger og fire røde ledninger. Ledningene skal ut fra sukkerbitene på hver arm og samles bak på quadcopteret. Her får du bare måle til for hånd og bestemme selv hvordan du vil legge dem langs kroppen på farkosten. Det skal gå ganske mye strøm gjennom disse ledningene. Og de er koblet direkte til et batteri som kan levere store mengder energi på kort tid. Så her bør du gjøre ting litt skikkelig. Skru til sukkerbitene ordentlig og vær nøye med at du ikke tar av for mye isolasjon. Kortslutning kan føre til gnister, flammer og et batteri som til slutt kan eksplodere.

Du kan velge selv om du vil trekke alle ledningene frem og lodde dem sammen, eller koble dem sammen med andre metoder. Vi prøver som nevnt tidligere å gjøre dette nybegynnervennlig, så vårt forslag er å koble sammen med Wago-klemmer.

De kommer i varianter med fem koblingspunkt. Det er akkurat det du trenger. Fire ledninger inn og en ut. Vi kjøpte våre hos Clas Ohlson.
Om du vil lodde ledningene sammen anbefaler vi at du følger metoden til David Windestål. Tvinne sammen, forsterke med ekstra ledning og fylle på med loddetinn.
 (Bilde: David Windestål)
(Bilde: David Windestål)
Du kan se bilder i hans byggelogg for Trikopter.
Nå har du et quadkopter med motor ytterst, sukkerbit med tre koblinger, hastighetskontroller, sukkerbit med to koblinger og så ledninger som samles sammen til fire svarte og fire rød i hver sin Wago.

Og om du syntes bildet over viser noe som ikke er identisk med det du nettop har bygget har det sin naturlige forklaring: For å samle mest mulig erfaring som vi kan dele har NRKbeta-redaksjonen valgt litt forskjellige tilnærminger. Farkostene på bildet har lengre armer og større kryssfinerplate i midten.
Fra de to Wago-klemmene skal det nå en svart ledning til minus på batteriet og en rød ledning til pluss på batteriet.
Batterier og lading
Først må vi nok en gang nevne at batteriene er meget kraftige. Kortslutning kan være direkte farlig og du må aldri lade dem uten tilsyn. De skal ligge på et underlag som ikke er brennbart når de lades.
LiPo-batterier bør aldri tømmes helt. Og du bør bruke en balansert lader som holder øye med hver enkelt av de tre cellene i batteripakken.
Batteriet har et hovedutak og et balanseringsutak.

Batterier kommer med forskjellige hovedplugger. Eller helt uten plugger. Så her må du enten velge å standardisere på en type batteri og sette på tilsvarende plugg på quadkopteret ditt. Eller så må du standardisere på en type plugg å vite at det første du må gjøre når du kjøper et nytt batteri er å sette på ny plugg.
Vi har gjort det siste. Og valgt XT60. Du skal uansett ha en hann-plugg på selve farkosten og hunn-plugger på batteriene.
For å lage hann-tilkoblingen på quadkopteret trenger du altså en hann-plugg og to ledninger som er lange nok til å ta deg fra Wago-klemmen til et sted under/bakpå rammen. Lodd pluss til den røde ledningen og minus til den svarte.
Du kan eventuelt kjøpe en ferdig loddet plugg. Om du har bestemt deg for XT60 finner du en ferdig sak her: XT60 Male w/ 12AWG Silicon Wire 10cm (5pcs/bag)
Om du har kjøpt batteriene fra DealExtreme som vi linket til i handlelisten vår kommer de med den nå litt gammeldagse T-pluggen.

Det første du må gjøre med batteriet er da å bytte til XT60. (Eller legge på litt ekstra i porto og heller bestille batteriet ferdig med XT60 fra HobbyKing.)
Når du setter på ny plugg på batteriet er det viktig å lodde skikkelig og for all del unngå kortslutning. IKKE klipp av begge ledningene samtidig! Klipp av den ene, lodd den på XT60, legg på godt med isoleringstape og begynn så på den andre.
Batteriladeren fra DealExtreme kommer også med de gamle T-koblingene.

Så her må du selv lage en overgang slik at du kan lade XT60. Du skal ha en hann-plugg på laderen. Koble sammen en XT60 med to banan-plugger. Pluss til en rød plugg og minus til en svart plugg.
Når du skal lade batteriet kobler du den hvite balanseringspluggen til riktig kontakt på laderen. Så setter du i selve hovedkabelen i bananplugg-uttaket.

Du må ALDRI sette batteriet i den lille bananpluggovergangen med bananpluggene hengende fritt. Da er faren for kortslutning stor. Sett bananpluggene i laderen først. Så kobler du til batteriet.

På laderen kjører vi med følgende oppsett når vi har god tid: «Program select: LiPo Batt», funksjon: LiPo Balance, 1.0 A, 3S 11,1V. Når vi har litt dårligere tid kjører vi LiPo Charge, 2.0 A.
Og her tar vi gjerne innspill fra ekspertene der ute. Laderen kan kjøre på med alt fra 0,1A til 5A. Hva er det optimale for batteriene vi benytter her? Hvor ofte bør vi kjøre «balance» og når kan vi kjøre vanlig «charge»?
Styring
Da har du fått på plass strømmen. Nå er det selve styringen som skal kobles.
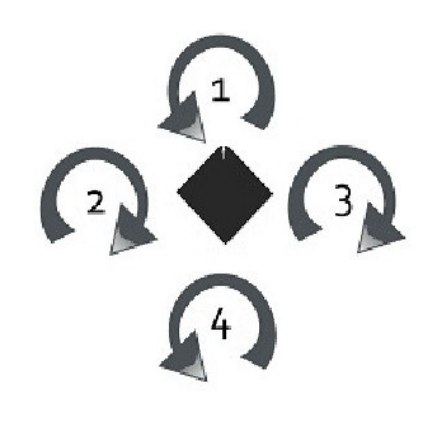
Når du skal fly i såkalt pluss-modus peker en av motorene mot fronten, en bakover, en mot høyre og en mot venstre.
Styringen gjøres ved å variere hastigheten på motorene. Retningene i luften beskrives med forskjellige begreper. Avhengig av om du flyr helikopter eller fly, snakker norsk eller engelsk. Kort fortalt handler det om å bevege quadkopteret opp og ned, frem og tilbake, mot høyre og venstre og kunne rotere det rundt sin egen akse.

Når du skal koble delene sammen kommer du borti begrepene som brukes for å beskrive bevegelsene. På tegningen over har vi prøvd å vise hva de betyr. Her er en forklaring:
Throttle
Dette er på en måte gasspedalen. Den gir fart på alle motorene og tar quadkopteret opp og ned.
Elevator
Denne beveger helikopteret fremover og bakover. Kalles også «pitch». Styrer hastigheten på motorene foran og bak på farkosten. Trekker du spaken fremover vil du få mer fart på bakre motor og mindre på fremre. Quadkopteret legger seg så fremover og skyter fart.
Aileron
Beveger quadkopteret mot høyre og venstre. Kalles også «roll». Trekker du spaken mot høyre vil du få mer fart på motoren på venstre side og mindre på høyre side. Da vil quadkopteret legge seg over og kjøre mot høyre.
Rudder
Lar quadkopteret rotere rundt sin egen akse. Kalles også «yaw». På quadkopteret går to av propellene med klokken og to mot klokken. For å få farkosten til å kunne rotere rundt sin egen akse justeres hastigheten på de to parene i forhold til hverandre.
På fjernkontrollen styres disse fire parametrene slik:

..dersom du har en fjernkontroll i det som kalles «modus 2», som er det absolutt mest vanlige i vår del av verden.

Det er mottakeren som hører til fjernkontrollen som kobles til KK-kortet. Der må du sette riktig kanal på riktig kontakt. På kortet er det fire kontakter som heter «Ail», «Ele», «Thr» og «Rudd». Du må finne ut hvilken kanal som passer til hvilken funksjon. På Futaba og Turnigy er det følgende:
1 = Ail (Aileron)
2 = Ele (Elevator)
3 = Thr (Throttle)
4 = Rudd (Rudder)

De tre kontaktene er minus, pluss og signal.

Minus er den kontakten som er ut mot yttersiden av kortet (som oftest svart eller brun ledning). Pluss er i midten (som oftest rød ledning) og signal er inn mot kortet (som oftest hvit eller oransje ledning).

Kablene du trenger mellom mottaker og kort er hun-hun. Vi fikk ikke tak i dem ferdig og loddet selv. Vi kjøpte rett og slett forlengelsesledninger som er han-hun. Klippet dem over og loddet sammen de fire hun-hun-ledningene vi trengte.

Du får også tak i kontaktene for å lage ledningene selv hos for eksempel Smallsize.
Koble til motorene
Ut fra hastighetskontrollerne kommer det en flatkabel med tre ledere i tillegg til strømkablene. Disse skal kobles til kontrollerkortet. Motorkontaktene på kortet er merket med M1 til M6.
NB! Om motorer og retning
Hvilken retning motorene skal gå er avhengig av hvilken programvare du har på kortet. Her er det litt forvirring, og det er ikke godt å si nøyaktig hvilken programvare som ligger på kortet når du får det.
Som det blir nevnt i kommentarfeltet er dette konfigurasjonen som ligger i instruksjonsmanualen til KK-kortet fra HobbyKing:

Men om du har fått et kort med 4.7-programvaren, eller oppdatert kortet selv skal motorene konfigureres som vist under.

Og for X-konfigurasjon med programvare 4.7 slik:

Hva om jeg gjør dette feil?
Om du kobler motornummerne riktig, men med motsatt rotasjonsretning vil helikopteret bare rotere fortere og fortere rundt sin egen akse. Dette kan du da rette ved å reversere Yaw-gyroen eller bytte rotasjonsretning på motorene. Da må du også bytte propellene slik at du får riktig skyvekraft. Om du setter på propellene motsatt vil farkosten presse seg ned i stedet for å presse seg opp og lette…
Siden det finnes mange typer KK-kort og mange typer programvare til det er det vanskelig å gi en endelig løsning på nøyaktig hvordan du skal koble ting opp på ditt kort. Det er også vanskelig for oss å vite når for eksempel HobbyKing begynner å sende ut kort med ny programvare.
Derfor bør du sette deg inn i instruksjonene som følger med kortet du kjøper og ikke minst prøve å forstå hvordan det hele virker. Da er det lettere for deg å eksperimentere deg frem til riktig løsning.
Det er ledningene som kommer fra hastighetskontrollerne som skal kobles på motorkontaktene på kortet.

Det er gjennom disse ledningene at selve KK-kortet får strøm. Du trenger med andre ord ikke å koble på en egen strømkabel for at kortet skal starte. Når du enkelt og greit kobler på alle de fire flatkablene fra alle de fire hastighetskontrollerne vil KK-kortet få strøm fra alle sammen.
I de forskjellige guidene vi har sett er det litt forskjellige anbefalinger. Noen mener at det er helt greit å bare koble til alle sammen med alle tre ledningene. Andre mener det er viktig at du kutter av pluss-kabelen på tre av flatkablene slik at kortet bare får strøm fra en av hastighetskontrollerne. Dette for å unngå forstyrrelser, jordings-sløyfer og skade på hastighetskontrollerne.
For å være på den sikre siden skal du derfor kutte den røde pluss-kabelen på tre av ledningene. Slik at kortet bare får strøm fra en ESC. NRKs helikopterekspert Petter Olden forklarer dette i kommentarfeltet til vår forrige artikkel:
Pettercam for 3 dager siden
Det er helt korrekt at du trenger kun at èn trefargetledning er koblet til KK-kortet med alle ledningene intakt (de har enten fargekode oransje, brun og rød eller sort, hvit og rød). På de andre tre trefargetledningene MÅ du kutte av pluss ledningen(e). De er røde. Dette er fordi at KK-kortet kun trenger strøm fra en av ESC-ene.Hvis du kobler til ALLE fire esc-er med alle ledninger til KK-kortet så risikerer man feilkalibrert og feilsynket strøm (litt vanskelig å forklare dette men håper det går…) og dermed vil esc-ene ødelegges IKKE KK-kortet. Grunnen er at alle esc-er, selvom de er “klin-like” aldri klarer å levere helt lik spenning og dermed vil esc-ene, hvis alle er koblet til med alle ledninger, risikere å ødelegges over en tid fordi de blir påvirket av strømmen som de andre ESC-ene leverer.
Oppsummering:
– IKKE mate KK-kortet med strøm fra ALLE ESC-ene, det er kun en ESC som trengs til jobben.
– Tre av ESC-ene må man modifisere/klippe av den røde plusskabelen (den som er trefarget).
Start your engines!
NB! På dette tidspunktet skal du IKKE ha propeller på farkosten. Nå tar du en ekstra sjekk. Alle ledningene. Pluss og minus. Stram koblingssukkerbitene.
Så sjekker du potmeterne på kortet. De er merket Yaw, Roll og Pitch. Holder du kortet med potmetrene mot deg kan de justeres som en hvilken som helst volumkontroll. Vri mot venstre er lavere verdi, vri mot høyre er høyere verdi.

Her har jeg sett rapporter om at potmetrene på enkelte kort er reversert. Så det kommer kanskje an på modellen. Men alle kortene fra HobbyKing som vi har sett fungerer som nevnt her.
Sett Roll på ca 50%, pitch på ca 50% og Yaw på 100%.
Så er du klar til å koble på strømmen. Når du plugger i batteriet skal ting våkne. Litt avhengig av hvilken radiomottaker du har vil et eventuelt LED-lys på den tennes. Så vil motorene spille sin lille ESC-melodi. Noe i retning pip-pip-pip — piiip-piiip-piiip —- piiiip
Selve KK-kortet har en sikkerhetsmekanisme innebygget. Så det våkner ikke før du slår det på ved hjelp av fjernkontrollen. Dette gjøres ved å ta venstre spake helt ned og mot høyre i ca 5 sekunder. Eller forklart på en annen måte: «throttle» helt ned og til høyre. Dette fordi du da er helt sikker på at ikke farkosten gir bånn gass uten kontroll når du setter i strømmen (dersom fjernkontrollen hadde gasspedalen eller «throttle» på fullt).

Når du gjør dette skal kortet «armeres». Da begynner lysdioden på kortet å lyse. Dersom den IKKE begynner å lyse kan det ha flere årsaker. Er strøm og alt koblet riktig kan det hende at du må reversere «throttle» eller «rudder» på fjernkontrollen. Siden du ikke har propeller på kan du tillate deg en sjekk: dra throttle helt ned og til venstre i fem sekunder. Dersom kortet da armeres må du reversere «rudder». Om ikke det fungerer drar du throttle helt OPP og til høyre. Dersom den da armeres må du reversere «throttle». Med min Futaba fjernkontroll måtte jeg gjøre nettop dette.
Om den fremdeles ikke armerer drar du throttle helt opp og til venstre. Om den da armerer må du reversere både throttle og rudder.
Hvordan du reverserer en kanal må du lese deg frem til i instruksjonsboken til fjernkontrollen. Dette er forskjellig fra modell til modell.
Et annet tips for å få kortet til å armere er å eksperimentere litt med trim-justeringen til throttle og rudder. Alle kanalene har en trim-knapp. Som oftest på høyre siden og under spaken. Høyre side er throttle-trim og under er rudder-trim. Prøv deg frem ved å justere ned throttle-trim og se om det armerer da.
Når kortet er armert på riktig måte kan du forsiktig dra throttle opp. Du vil da se at motorene etter hvert starter. Men at de starter på forskjellige tidspunkt. Setter du propeller på riggen din nå vil den være helt umulig å fly. Du må kalibrere alle hastighetskontrollerne slik at de starter nøyaktig likt. Dette gjøres med litt «KK-voodo»:
Koble fra batteriet slik at farkosten ikke har strøm. Slå av fjernkontrollen. Så:
-Skru Yaw-pot til null (helt mot venstre).
-Slå på fjernkontrollen.
-Dra throttle helt til maks.
-Koble på batteri (slik at KK-kortet får strøm).
-Vent til motorene piper to ganger etter at de er ferdige med sine innledende pipelyder.
-Dra throttle helt ned. Da skal motorene pipe igjen.
-Trekk ut batteriet igjen.
-Skru Yaw-pot tilbake til maks.
Når du nå slår på igjen og armerer tester du forsiktig med å dra throttle oppover. Da skal motorene starte helt synkront. Om de ikke gjør det repeterer du øvelsen over.
Sjekk motorene
Nå må du sjekke at motorene går riktig vei. Vi tillater oss å repetere tegningen fra lenger oppe i artikkelen:
Motor nummer 1 og nummer 4 skal gå med klokken, motor nummer 2 og 3 skal gå mot klokken. Start opp systemet og sjekk motorene. Dersom de ikke går riktig vei bytter du bare om på to av de tre kablene til den motoren som går feil vei (de tykke ledningene mellom motor og hastighetskontroller). Da skal den snu.
NB! Denne artikkelen har blitt oppdatert siden første versjon når det gjelder motorkonfigurasjon. Det ser ut som de fleste kort nå kommer med programvare som krever plassering og retning som anvist på den oppdaterte tegningen vi nå har lagt inn.
NBNB! I manualen til kortene som selges fra HobbyKing i skrivende stund oppgir de følgende motorkonfigurasjon:
Så som vi har beskrevet lenger oppe i artikkelen: følg med på manualen til kortet du har kjøpt. Konfigurasjonen avhenger av hvilken programvare som ligger på kortet. Og dette kan eventuelt endre seg om leverandøren begynner å sende ut kort med en annen programvare.
Når alle motorene starter synkront og går riktig vei skal du sjekke om styringen er riktig. Drar du høyre spake til høyre skal venstre motor øke hastigheten. Drar du den samme spaken mot venstre skal høyre motor få mer hastighet.
Drar du høyre spake fremover skal bakre motor gi på, og drar du samme spaken mot deg skal fremre motor øke hastigheten.
Drar du venstre spake til en av sidene skal hastigheten på motor 1 og 4 justeres i forhold til hastigheten på motor 2 og 3.
Det er veldig vanskelig å vurdere dette nøyaktig uten propellene på, så når du tror ting går riktig tar du av strømmen og setter på propellene. De såkalte «prop savers» som vi opprinnelig hadde i artikkel nummer 1 i serien fungerer greit men er ikke perfekte. Du setter dem på slik:


Men siden de bygger litt mye på motorpinnen fant vi ut at en liten modifikasjon med bor og fil gjorde det hele litt mer stabilt:

I ettertid har vi funnet noen fester som passer bedre og har oppdatert artikkel 1 i serien.
Jomfruturen
Gå ut, finn en stor åpen plass (helst gressplen) og sett quadkopteret på bakken et sted der det ligger så plant som mulig. Gå ca 10 meter unna, slå på KK-kontrollerkortet (venstre spake ned mot høyre i fem sekunder) og dra forsiktig opp throttle. Prøv å få quadkopteret ca 50 cm opp fra bakken. Det skal være noenlunde stabilt. Dersom det går til venstre når du vil til høyre må du reversere den kanalen på fjernkontrollen. Det samme gjelder de andre: om det går bakover når du vil fremover eller vrir seg mot venstre når du vil vri det mot høyre.
Men denslags justeringer er relativt enkle å se. Vi hadde problemer med to andre ting:
Først ville bare quadkopteret oppføre seg som en karusell. Det roterte rundt og var helt umulig å styre. Da var det den ene gyroen som måtte reverseres. Den såkalte Yaw-gyroen. Den holder orden på rotasjon. Og når den i utgangspunktet var satt opp «feil vei» drev den og forsterket rotasjon i stedet for å hindre rotasjon.
Ting så slik ut:
For å reversere en gyro gjør du følgende:
1: Set roll-potmeter til null
2: Sett strøm på batteriet / KK-kortet
3: LED-lyset på kortet blinker 10 ganger
4: Flytt litt på stikken for den gyroen du vil reversere
5: LED-lyset begynner å blinke kontinuerlig
6: Trekk ut batteripluggen / strømmen til kortet
Så hadde vi problemer med overkompensering. Da vibrerte farkosten frem og tilbake:
Dette løste vi med å skru potmetrene litt ned. Når farkosten flyr er det bare å begynne å finjustere. Med potmetrene på KK-kortet: skru dem opp mot maks til farkosten begynner å vibrere. Så skrur du ned litt og litt til den er stabil.
Og med trim-justeringene på fjernkontrollen: om quadkopteret hele tiden drar mot høyre, venstre, fremover, bakover eller i rotasjon kan du finjustere for å få det til å henge i ro i luften ved hjelp av trim-justeringene på fjernkontrollen.
Nå begynner dette å bli spennende, så da er det viktig at du ikke går tom for strøm mens du er i luften. Derfor har du bestillt en batterialarm. Den satte vi enkelt og greit på ved siden av natteriet ved hjelp av borrelås. Du kobler balanseringspluggen fra batteriet til alarmen. Pass på at pluss og minus kommer riktig på hver sin side. Alarmen gir et høyt pip og lyser med tre grønne LED om du har koblet riktig. Når batteriet begynner å bli dårlig begynner den å blinke rødt. Så begynner den å pipe høyt.

Da er det bare å fly. Her er en liten samling testklipp fra noen turer med betakopter V1.
Som dere ser har vi allerede utvidet litt. Med pan/tilt for å kunne justere 808-kameraet og med diverse lys for å se tydeligere forskjell på bak og frem i mørket.
Viktig: før hver tur bør du gå over alle skruer og stramme dem. Vibrasjonene gjør at de kan løsne. Du vil IKKE at en propell detter av eller at en sukkerbit mister strøm til en motor mens du er 20 meter oppe i luften!
Jeg har fått god hjelp både på fpv.no og modellflynytt.no under byggingen. Trådene der denne artikkelserien diskuteres er:
FPV.no – Byggelogg på NRKbeta
Modellflynytt.no – Byggelogg på NRKbeta
Da er det bare å fyre løs i kommentarfeltet. Med både spørsmål og linker til bilder og tips!
Oppdatering:
Martin linker til følgende video i kommentarfeltet. Den gir mange tips angående detaljer rundt KK-kortet og hvordan du setter det opp:
Flott guide! Jeg ble enda mer interessert i å bygge etter å ha lest fortsettelsen. Men jeg har noen spørsmål:
– Til mitt modellfly må jeg skru senderen på først og koble til strømmen i flyet etterpå for at mottakeren skal virke normalt, og motsatt når jeg skal skru av. Jeg kunne ikke se det i artikkelen, så derfor lurer jeg på om senderen er på når dere kobler til strømmen i kopteret?
– Har dere noen av/på-bryter mellom batteri og ESC-er eller plugger dere bare i batteriet før bruk?
Hvis du skal montere bryter mellom batteriet og Esc, så bør den være av det solide slaget. Siden hver av motorene kan trekke inntil 9,5A, får du 38A maks strøm, og det er ganske mye. Spørs om WAGO-klemma også vil kunne slite litt med den strømmen der…
Wago oppgir 32A for disse klemmene, så det går nok helt fint med 38A i kortere perioder.
Hva med å ta det ett steg videre? 🙂
First manned multicopter takes flight, brave human sits amidst blades (video)
Gale, gale ingeniørene… Vi overlater den til NRKbetas ekstremsportalibi: Marius Arnesen. Ser rett og slett ikke helt trygt ut. 🙂
Dere er helt rå 🙂 Venter på deler jeg nå bare, mesteparten ligger i tollen i Norge nå. Bestilte dobbelt opp av hver ting så jeg kunne i teorien bygge to men til de som skal bestille nå: ikke gjør som meg! Jeg gikk på en liten budsjettsmell på grunn av ekstra toll på ting. Ble et par tusen ekstra men shitt au, gleder meg som et lite barn!
NRK beta er blitt mitt favorittnettsted, keep it up! 🙂
Herlig å følge med på prosessen selv om jeg neppe vil bygge noe selv med det første. Hadde vært svært tøft å kunne styre quadkopteret via video feed fra kameraet til en pc, eller med radio kontrolleren og en lcd skjerm. Hva er eventuelt utfordringen dere ville måttet løse i forhold til dette?
Flott artikkel.
Venter bare på ESC’ene som aldri kommer på lager, så er jeg klar. :p
Vedr. lading av batteriene:
Jeg har blitt fortalt at LiPo-batterier skal lades med 1C (C står for capasity)
Eksempel:
På et 3 cell 2200 mah batteri står det 15C. Dette batteriet kan da belastes med 15 X 2200 = 33 000 mah = 33 A. Dette gjelder strømtrekk ut.
Batteriet tåler ikke like heftig lading. 1 C i dette tilfellet vil være 2200 mah (eller 2.2 A). Man kan evt. lade med noe mer Amp, men dette vil svekke batteriet over tid.
Takk!
hm… det betyr vel at batteriet her er litt i underkant, siden motorene kan trekke opptil 38A. Kanskje det hadde vært bedre med lokalt batteri til hver motor, evt 2-4 parallellkobla batterier (i tilfelle ett skulle ramle ut)?
Belastningen på batteriet vil nok sjelden bli 38A i og med at man sjelden kjører et quadcopter på full gass. Om man gjør det vil det uansett bli korte perioder, og det tåler som regel batteriene.
Hadde man hatt samme oppsett i f.eks. et fly , måtte man nok hatt kraftigere batteri.
Ikke helt sant. Det angies ofte 2 C-varianter på abtterier i dag: En for utlading og en for opplading. Det er ikke uvanlig av man kan lade batterier på 5C for eks. På ett slikt 2200mAh kan man da lade det med 11A! Ladetiden blir redusert til ca 10min i såtilfelle.
Det er forøvrig anbefalt å holde seg til 1C uansett ladekapasitet, men i noen tilfeller «kan» man ikke vente 1 time for å ha opplada batterier å flekke til med noen flere C på ett batteri som er dimensjonert for det betyr ikke stort.
Dette er grunnen til at jeg betaler lisensavgift med glede!!
Hvor stor kapasitet (mAh) har dere på batteriene, hvor mye (ca) veier de og hvor lang flytid får dere ut av det?
Vi bruker stort sett 2800 mAh. 30C. De veier 212 gram og gir en flytid på ca 10 minutter med vår ganske tunge men funksjonelle, billige og solide rigg. Det er mulig å bygge dette mye lettere og dermed få lengre flytid på samme batteri. Tipper en mer erfaren pilot også vil få lengre flytid. Blir mye kompensering og vingling når vi er ute og øver oss…
På en måte artig, men samtidig veldig fjernt fra det jeg forventer fra NRKbeta.
Hva blir det neste? Hjemmelaget gitarkurs, av og for nybegynnere?
Her var nerdefaktoren alt for lav 🙂 Dette er guttemekking på 10-års stadiet!
Forventer at lista legges en god del høyere i neste prosjekt.
Nope. Det blir isåfall gitarbyggekurs av erfarne for erfarne. Kollega Hofseth har mange fete gitarer på samvittigheten…
Og angående helikopter kommer vi til å følge opp med en sak om NRK’s octo og profesjonell bruk i fjernsynsproduksjon. Det blir kanskje nerdete nok? 🙂
Sløydgitar er faktisk sterkt undervurdert! Problemet er at sløydlæreren svært sjelden er gitarist og ikke vet hva slags materialer som egner seg til hva og f.eks. mensur og intonasjon er. Derimot med en veileder som både har peiling på trearbeid og elektronikk, så er dette både gøy og lærerikt.
Selv er jeg leken nok til å kunne gått i gang med et QGC – Quad Guitar Copter prosjekt basert på en Ibanez RG350, jeg ikke bruker så mye. Vedder på jeg hadde ligget godt an i the World Annual Air Guitar Contest.
[Liker]
Tusen takk for en fin artikkelserie, håper at det kommer flere deler. Dere har bl.a. vært inne på å komme nærmere inn på fpv. Jeg sitter med noen spørsmål. Dere skriver i denne artikkelen at dere har bygget en med større kryssfinerplate i midten og lengre armer. Påvirker dette fly-egenskapene? Er propellene lengre unna sentrum, hvordan påvirker dette eventuelt fly-egenskapene? Merker meg også at dere også har satt på pan/tilt, hvordan er det koblet og hvordan styres det? Har et siste spørsmål, er det noen som har erfaring med radio FlySky, som er til salgs på ebay?
Lengre armer skal gi en «roligere» farkost. Propellene står lengre fra hverandre og må gjøre litt større utslag for å vippe quadkopteret.
Pan/tilt har vi koblet på to ekstra kanaler på fjernkontrollen. Disse kanalene styres med potmetre. Men denslags blir mer nyttig når styringen er koblet til kontrollerkortet i tillegg. Slik at kamera stabiliseres automatisk. Enn så lenge støtter ikke KK-kortet automatisk kamerastabilisering.
Når det gjelder FlySky har vi ingen erfaring, så den må vi overlate til andre.
Tusen takk for en herlig artikkelserie. Dette ser moro ut, men jeg savner fremdeles (som nevnt i del 1) en beskrivelse av hva som trengs/hvordan man får til FPV. Da tenker jeg på en liten LCD-skjerm festet til radioen og et lite kamera festet til quadkopteret. Kan noen hjelpe med hvordan jeg går frem for å få dette til og hvilket utstyr jeg må skaffe til veie for at det skal kunne fungere? Poenget er å kunne fly uten å måtte se på quadkopteret.
Vi vil på det sterkeste anbefale at folk begynner med å lære seg å fly skikkelig uten FPV. Videosender og den typen flyging krever mer kunnskap og erfaring. Ikke minst i forhold til lover og regler. Både når det gjelder videosendere og når det gjelder flyging uten direkte øyekontakt med farkosten.
Vi kommer til å titte på FPV etter hvert også. Men det blir nok en stund til. Om du er svært utålmodig er http://fpv.no din venn! 🙂
Herlig artikkel! Er nylig ferdig med å bygge tricopter selv, etter guiden til rcexplorer.se. Har montert GoPro på den, og det ser ut til å være ganske mye mer stabilt enn betakopteret deres, sikkert på grunn av de lengre armene. Liten testvideosnutt: vimeo.com/31735762
Hovedgrunnen til at video fra 808-kameraet på vår rigg til tider er svært ustabil er nok mer selve kamerafestet enn quadcopteret. Men generelt er det riktig at trikopter med lange armer er stabile og fine.
Sant nok, uansett fungerer kamerafeste til Windestål utmerket 🙂
Er det noen som vet hvor jeg kan finne kildekoden til dette? Det har blitt nevnt at den er GPL, men jeg har ikke klart å finne den. Det vil si… Jeg fant noe her – kkmulticopter.com/index.php?option=com_content&view=article&id=52:quadrocopter-firmware�… – men når jeg pakker ut den, så ligger det bare noe prekompilert-i-hex og assembly. Jeg har jobba litt med atmega fra før og … atte … man bruker da ikke assembly i 2011, gjør man? man gjør kanskje det om man heter Rolf Bakke… Tenk om noen kunne skrive om dette i noe litt mer forståelig som C? 😛
Svarer meg selv her… Det er visst slik at den opprinnelige koden var skrevet i assembly, og denne eksisterer fremdeles, og utvikles av KapteinKuk. Denne koden har blitt portet til C i et par omganger, og den siste er visst rcgroups.com/forums/showthread.php?t=1526268 fra februar i år. Så, hvordan velge hvilken programvare man skal kjøre, avhenger vel mest av om du kan bruke koden som den er, eller om du vil utvide den sjøl, og hvis så, om du er stø i assembly eller foretrekker et «høynivåspråk» som C.
Litt mer her – de nevnte prosjektene er alle aktive på bloggen på rcgroups.com, men så vidt jeg kan se finnes ikke mailinglister eller noen IRC-kanal. OpenPilot.org ser derimot ut til å være noe bedre strukturert. Der er det laget en kontroller som er nogle hakk dyrere enn den fra kk, men som til gjengjeld virker endel hakk hvassere: 72MHz ARM Coretex A3, Seriebusser: 5 USART, 2 SPI, 2 I2C, 32bit-akritektur, og sannsynligvis ARMs conditional execution (i stedet for branches, sånn at lettere unngår cache flush). Den kommer også med «ground control software» for å styre ting sentralt, med autopilot og etter hva jeg kunne se auto-retur i tilfelle radiofeil.
Med de serielinkene, vil det være mulig å lettere å snakke med andre ting, som for eksempel nevnte Pandaboard (under) eller kanskje innmaten til en gammel Android-telefon? 😉
roy
Vi har bestillt et par OpenPilot CopterControl-kort. Så vi kommer tilbake i kommentarfeltet her med litt erfaring når vi har fått dem.
Jeg lurer på hvor dere får kjøpt de korta?
Det er visst utsolgt inntil videre, i hvert fall i Europa. Det jobbes med en ny batch, men jeg har ikke sett noen dato. Det går an å melde seg på mailing liste for openpilot, evt gå inn på #[email protected] på IRC
roy
Jeg kom over denne siden som kanskje kan være interessant. : multiwiicopter.com/ Den er basert på en Arduino Pro og har blant annet auto-levelling.
Dette er jo vel og bra, men om man skal gjøre noe mer ut av det, så er jo den Atmel-brikka noe i minste laget til å kunne brukes til noe mer. Vi vil vel helst ha muligheter for streaming over 802.11n, både til monitor og potensielt til en server et sted? GPS hadde jo også vært greit for å kunne geotagge alt, gjerne også det i sanntid. Så kanskje et pandaboard til å gjøre grovarbeidet? 🙂 På et pandabrett har du en dual-core 1GHz OMAP4430 ARM Coretex A9, 1GB minne, 802.11n, og tilkoblingsmuligheter som kamera, kortlesere for SD-kort og diverse busser. CPU-messig er det nok voldsomt overkill, men det skader ikke med litt ekstra 🙂
Du må vente til de får inn nye kort her: opstore.eu/en/1-coptercontrol.html Som det blir nevnt over kan du få epostoppdatering når de kommer.
Eirik Solheim; fikk du testet propellene fra DealExtreme? Litt dyrt på den sjappa i tyskland. Propellene kosta rundt €3 for 2stk, men så var det 200~ ifrakt, så 250~ i toll\gebyr. Heh.
Om du dropper propsavers og går over til propellfester. Men da må du også kjøpe deg en propellbalanserer. Jeg benytter denne:
shop.smallsize.no/product_info.php?products_id=2658&osCsid=bbd2a74313eb450915a5a0bbc350eb91
Med denne løsningen må du bore ut propellene selv. Det er ikke vanskelig, men kan føre til små unøyaktigheter og da er det absolutt best om du får balansert propellene skikkelig etter boring.
Jeg benytter dette nå. Billige propeller fra Dealextreme som jeg borer ut med et 5 mm bor. Flyr helt strålende:
Fester: dealextreme.com/p/r-c-plane-3-0mm-motor-shaft-propeller-prop-adapter-5-pack-82424
Propeller: dealextreme.com/p/nylon-9-x-5e-propellers-for-quadkopter-black-5-piece-67108
[…] I neste del tar vi for oss sammenkobling og siste finpuss. […]
Hei
Kanskje jeg har gått glipp av noe?
Når dere flyr i demo-video, ser det ut som dere flyr i X-konfigurasjon, stemmer det? I del 1 og del 2 refererer dere til +-konfigurasjon og beskriver hvor de ulike motorene skal plasseres.
Jeg sitter med ett KK Quad X4.7 kort og antar det er i X-konfig, men hvor skal da de ulike motorene plasseres, venstre fram motor1? osv.
Øyvind
Det er helt riktig observert. Vi har koblet kortet til laptopen og lastet opp ny programvare via en USB-kortflasher og kjører 4.7 i X. Men siden artiklene våre er beregnet på nybegynnere har vi tatt utgangspunkt i KK-kortet slik det kommer fra HobbyKing i + for at folk skal slippe å kjøpe programmerer og styre med programvarebytte.
Men har du flashet kortet eller bestillt det med X-programvare er motorkonfigurasjonen slik:
X-mode setup 4.7
Motor 1: front left, CW
Motor 2: back left, CCW
Motor 3: Front right, CCW
Motor 4: Back right, CW
Hei, og takk for tilbakemelding.
Da blir det oppkobling til helga, og kanskje første flytur…
Øyvind
Culexus har skrevet en fin guide for programvare versjon 4.7 på FPV-forum:
fpv.no/vbulletin/showthread.php/850-Guide!-Ny-firmware-til-KKmulticopter.?s=cc9bae059748def6da77622772b76f4b
Her er noe for de som vil ha et nytt prsjekt etter quadkopteret, nemlig et Gunship fra Avatar. Denne er laget med et KK-kort, men med en annen programvare: youtube.com/watch?v=KJCgVdv6U0I
Vi har fått kloa i et par OpenPilot CopterControll-kort.
Har ikke fått testet mye, men det lille jeg har fått testet viser seg fra en svært så stabil side.
Her er en bitteliten snutt:
happygolucky.no/2011/11/15/openpilot-ftw/
Hvor fikk du tak i dem? Jeg vil veeeeeeeldig gjerne ha et slikt til å prototype et kopter….
roy
Vi fikk tak i dem direkte fra OpenPilot i forbindelse med at vi jobber med denne artikkelserien.
De er imidlertid utsolgt i alle andre kanaler etter hva vi kan se…
Så – leser jeg det rett at CopterControl er hakket hvassere enn KK-kontrolleren?
Lurer på hva det vil koste å få bestilt produksjon av disse hvis man får tak i PCB layout eller finner noen som kan lage det… Kanskje like greit å bestlle opp noen om det tar altfor lang tid å vente på OpenPilot-gjengen 😛
roy
Ja. Uten tvil. Mens KK koster $24,- så koster CC $100,-
Det viktigste er at CopterControl har aksellerometer som gir en egen «stable mode» der du bare kan slippe spakene, så retter farkosten seg opp av seg selv.
Og så vidt jeg har skjønt er det snakk om bedre prosessor og bedre gyroer. Og utvidelsesmuligheter samt firmware som støtter automatisk kamerastabilisering.
Ellers er også MultiWii meget spennende. Du får ferdige kort her:
quadframe.com/collections/frontpage/products/mwii01
multiwiicopter.com/products/paris-quad-tricopter-sirius-600-mp-v4-0-llc-plug-n-play
De har også aksellerometer osv.
Men: KK-kortet er perfekt for nybegynnere. Fordi det er billig, stabilt og lar deg lære å fly skikkelig før du går videre til neste steg…
Er ikke noe vanskelig å få tak i Gerber-filer til CC. Gå inn på Git-hub’en til OpenPilot og der finner du Gerber-filer til både CC og FOSS JTAG. Har også tenkt å lage meg noen kort. Bestilte gyroene i går. Heldigvis har jeg en kollega som bor i USA, så det halverte prisen for 3 av hver gyro inkludert frakt… 🙂
Kan ikke annet enn å digge NRKbetas lesere. Her lager vi byggeartikkel for n00bs, så begynner dere å konstruere kontrollerkort fra grunnen av. 🙂
Det er jo selvfølgelig kun for å glede han som surmulet i del 1 om at dette ikke var geeky nok… 🙂
🙂
Det jeg stusset på var for det første at NRKbeta plutselig syslet med modelbygging og el-motorer (noe jeg selv har drevet med i årevis i forskjellige varianter helt fra 1966). For det andre er jeg vant til at Erik & co har et høyt kunnskapsnivå på det området de skriver om. Her virket det som om de var svært ferske i utgangspunktet, noe jeg ble litt skuffet over.
Nå har jo resultatet av hele prosjektet likevel blitt veldig interessant og bra, ikke minst på grunn av innspill fra mange kompetente og entusiastiske folk.
Så jeg tar flengende selvkritikk på mitt første, noe grumpy utspill!
Positive bidrag fra leserne og en åpen og ryddig holdning fra NRKß-redaksjon skapte en morsom og spennende tråd, med mye lærerikt stoff for mange.
Og bra flyving i Frognerparken, Erik! Kudos!
Blix
Fant dem – må bare se hvor jeg kan få printa kortet – hvem bruker du til dette?
roy
Har ikke gjort det ennå, men planlegger å bruke . Tar litt tid før jeg får kortene, men haster ikke… 🙂
Jeg har brukt olimex.com med en rekke ganger med godt resultat. Anbefales.
Jeg har også brukt Olimex før, men de lager kun enkeltsidige og dobbeltsidige kort. For en CC trenger du 4-lags kort.
Fant også iteadstudio.com for noen dager siden. En del billigere enn Olimex, men vet ikke hvordan kvaliteten er.
Vet ikke hvor kommentaren min gjorde av seg, men prøver igjen… 🙂
Har ikke gjort det, men planlegger å bruke DorkbotPDX (dorkbotpdx.org/wiki/pcb_order). Tar litt tid å få kortene, men det haster ikke. Får ikke gyroene før jeg drar på jobb i desember allikevel… 🙂
Jeg er litt forvirra her – hva slags propell bør jeg velge om jeg vil kjøpe noe fra hobbyking? De kommer jo i ørten varianter… De listet opp i del 1 er noen med diameter 10″, men når jeg slår opp på hobbyking, er det listet opp flere (f.eks, 10×6 og 10×9) – jeg antar at henholdsvis 6 og 9 her er «slope», men vet lite om hva det er og hvordan det påvirker farkoste… Kan noen hjelpe meg med et forslag eller tre her?
roy
oh samtidig – er det neon som vet om batterialarm og -lader fra hobbyking? kanskje greit å begrense antall steder man bestiller fra?
Alarm: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=7223
Lader: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=5548
Power til lader: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=6477
Jeg skriver litt om propeller lenger oppe: nrkbeta.no/2011/11/08/slik-bygger-du-ditt-eget-quadkopter-%E2%80%93-del-2/#comment-108164
Men det er DX-anbefalinger.
Men fra HK får du propelladapter: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=8722
…det viktige er 3 mm shaft.
Så må du bore ut propellene til 5mm. Men da kan du bruke disse:
hobbyking.com/hobbyking/store/__11333__10X6_Propellers_Standard_and_Counter_Rotating_6pc_.html
…og da bør du balansere (se kommentaren lengre oppe).
Jeg har også hatt suksess med 9×5-propeller. Og det KAN set ut som om disse har 3 mm hull: hobbyking.com/hobbyking/store/__11322__9x5_Propellers_5Pcs_Bag_.html
Da kan du i såfall bruke dem rett på motoren med prop-savers.
Har kjøpt noen og kan bekrefte at de har 3mm hull.
Jeg har forøvrig også testet 11×4.7 propeller også, (hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=22450), og de fungerer også bra. Farkosten er stabil, men reagerer nok ikke så kjapt. En fordel er at det er mye lettere å holde noenlunde konstant høyde, muligens fordi de store propellene hindrer raske variasjoner i turtallet. Hvordan det påvirker hva quadkopteret klarer å løfte har jeg ikke sjekket ennå.
Det blir også litt mykere landing om jeg skulle finne på å kutte motorene litt brått.
Rettelse: Propellene har ørlite grann større diameter enn 3mm. Oppdaget det ikke før jeg skulle bore dem opp og piloten på brotsjen min gikk mistenkelig romt i hullet.
Er det bare meg, eller er hobbyking.com totalt på bærtur? Jeg sitter her og bestiller, og så plutselig har den skrudd opp antalle ladere til 6, men glemt at jeg skal ha hastighetskontrollere (som jeg ba om 6 av)… Nå har jeg prøvd på Firefox og med Safari, men den virker fremdeles å være ute og sykle…..
Har også lagt merke til at det siste antallet du oppdaterte til i handlelista er det samme antallet som kommer på neste ting du legger inn.
Kjøpte noen 10×4.5 propeller fra eBay og de er seriøst ubalanserte. Jeg får finne frem Dremelen istedenfor bare en liten hobbykniv… 🙂
Har noen prøvd alternativ firmware til ESC’ene fra rcgroups.com/forums/showthread.php?t=1513678 ?
Ser ut som om strømforsyning til den laderen var utsolgt for tida. Vil noe sånt gjøre jobben greit? elfaelektronikk.no/elfa3~no_no/elfa/init.do?item=69-636-24&toc=19681
Ser også ut som at de hastighetskontrollerne ikke var på lager – vil noe sånt som dette funke? hobbyking.com/hobbyking/store/__658__TowerPro_W30A_Brushless_Speed_Controller.html
Til sist – dette radiosettet var latterlig billig – vil det funke greit for en nybegynner? hobbyking.com/hobbyking/store/__8992__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_2_v2_Fir…
Og – jeg regner med at batterier kan kobles i parallell uten videre dikkedarer?
roy
Så lenge batteriene har samme spenning, skal du kunne koble dem i parallell.
Som de sa i første del, den radion kan være bra, men det er hit’n’miss om du er heldig eller ikke.
Jeg bestilte Turnigy TY-P1 ESC, og planlegger å legge inn ny firmware fra rcgroups.com/forums/showthread.php?t=1513678 dersom det er Atmel i dem, som det virker som det er ifølge en post i den tråden.
Det var radioen jeg tenkte på, men den er visst ikke på lager. Den jeg så på, var denne hobbyking.com/hobbyking/store/__8338__Hobby_King_2_4Ghz_4Ch_Tx_Rx_V2_Mode_2_.html
Er det helt Gaustad å satse på noe sånt?
roy
Den du linker til der vil i teorien fungere. Absolutt minimum er fire kanaler og mulighet for å reversere kanaler. Og det ser det ut som den har. Men om du blir så mye som en antydning interessert i dette vil du ha noe bedre. Og det kan by på problemer at den ikke på noen måte er programmerbar. Du vil fort justere litt på hvordan ting styres.
Jeg ville mye heller satset på denne: hobbyking.com/hobbyking/store/__8992__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_2_v2_Fir…
Kollega Arnesen kjøpte en slik. Og er strålende fornøyd. Ryktene sier at det er litt ullen kvalitetssikring på dem, så du kan være uheldig. Men funker den er den helt super og veldig mye radio for pengene.
Ellers vil jeg fremdeles anbefale bruktmarkedet. Jeg betalte kr. 350,- for min Futaba 8U med en mottaker. Fikk den i 35 mhz FM-versjon, men kjøpte dette lille settet og fikk oppgradert til 2,4 gHz: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14348
nå var som sagt den der backlista, så jeg får håpe jeg får den billige, så får jeg heller skaffe noe bedre fra bruktmarkedet senere.
Uansett takk for svar 🙂
roy
Du kan eventuelt kjøpe Mode1 og bygge den om. Det var faktisk det Mr. Arnesen gjorde. Om du er istand til å bygge en quad er du istand til å bytte fra mode 1 til mode 2 på denne: hobbyking.com/hobbyking/store/__8991__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_1_v2_Fir…
….men de har satt opp prisen på mode1-radioen av en eller annen merkelig grunn.
Men som de sier selv under den billige: finfin backupradio…
Takk for veldig god byggelogg. Har tenkt til å følge deres byggeoppskrift, men venter fortsatt på en del varer fra HK. I tillegg har jeg ikke bestemt meg for radio ennå. I den forbindelse lurte jeg på om hva som en person uten amatørradiolisens har lov til å operere. Jeg ønsker å ha muligheten til å utvide med FPV og har forstått det slik at man vil få kraftig interferens ved å ha video og radio på 2,4GHz.På meg virker det som om jeg må gå for 35MHz på radio og 2,4GHz 10mW på video, eller er det andre anbefalte måter å gjøre dette på?
Har du en 2.4 GHz sender så kan du jo kjøpe en 5.8 GHz videosender/mottaker. Til et slikt prosjekt med Quadkopter så er 5.8 GHz veldig bra til nærflyging. Dvs til å fly rundt på en parkeringsplass, en park uten folk osv…
Bare husk å ha en kamerat med til å være dine øyne og se modellen fysisk (LOS – Line Of Sight), mens du titter på en skjerm/videobriller. Tenk ALLTIDS sikkerhet folkens.
[…] camera is a 808 HD. And the build log is in Norwegian: Part 1 and Part 2. Here is the Google Translate version: Part 1 Google Translate and Part 2 Google […]
Dere skriver at «Farkostene på bildet har lengre armer og større kryssfinerplate i midten.» Fant dere noen grei størrelse for oss n00bs? Jeg har lister på cirka 90cm og en stor nok bit 3mm kryssfiner…
Arnesens monster-quad har vel 75 cm mellom motorene og ligger svært stabilt i luften. Men er jo da også tyngre og litt mer upraktisk å ta med seg.
Du kan jo prøve deg med 60 cm mellom motorene og 5 cm ekstra utenfor hver motor. Mao. 70 cm armer, med motorene 5 cm inn fra enden på hver arm.
Har lest et sted at 60 cm er en fin nybegynnerstørrelse.
Men det meste flyr… Jeg kjører for tiden med en morsom liten sak jeg bygget med 38 cm mellom motorene… Men må innrømme at akkurat den gjør god nytte av den ekstra stabiliteten i CopterControl-kortet vi driver og tester.
Flott guide! Får utrolig lyst til å bygge en selv. Har dere gjort noen tester rundt hvor mye den klarer å løfte? Og hva er selve vekten på Quadkopteret?
Vekten på selve farkosten med batteri, radiomottaker og det hele blir 1-1,5 kilo. Avhengig av hvilke løsninger du velger, hvilket batteri du setter på og hvilken mottaker du har.
Vi har ikke testet den absolutte maksimal-løftevekten. Men tipper den er på rundt 0,5 kilo. Det er også avhengig av hvilke propeller du velger.
Vi flyr helt fint og uten merkbar påvirkning annet enn litt lavere flytid med et GoPro festet på QuadKopteret. Jeg har også flydd med et kompaktkamera hengende på. Det veier ca 250 gram og førte heller ikke til problemer.
Selve konstruksjonen er meget solid, så om du setter på større motorer kan du sikkert få denne typen farkost til å løfte opp mot en kilo.
Hei, jeg og mine klassekamerater satt sammen et quadkopter etter deres oppskrift, men nå vi skulle skru på kontrollen, kom det «Switch Error» på displayet. Hva er galt? Vi regner med det er på kontrollen noe er galt, men har prøv å stille mange knapper før vi skrur den på osv..
Vet dere hva som kan være galt? takk 😀
Du har ikke sagt hvilken radio det er snakk om, men dersom det er Turnigy 9x, må alle brytere stå i opp-posisjon når du skrus på radioen, ifølge noen kommentarer hos HK.
Stig har rett. Om det er en Turnigy 9x må alle bryterne stå opp, eller FRA deg for å unngå den klassiske «switch error».
Hehe, var det ja. Fikk det til nå. Vi hadde så lite tid igår så fikk ikke prøvd alle kombinasjonene 🙂
Takk for raskt svar! Da skriver jeg bare her hvis vi får flere problemer 🙂
Hei, vi var klare til start nå, men får ikke på KK-kortet. Trenger vi strøm til Receiveren? Står 4,5-6,5V så tør ikke koble direkte på batteriet.
Batteriet kobles til alle ESC’ene. ESC’ene kobles til KK-kortet. Dette gir strøm fra ESC’ene til KK-kortet. Det er litt delte meninger om du må kutte +-kabelen fra 3 av ESC’ene eller ikke. KK-kortet kobles til receiveren. Dette skal gi strøm til receiveren fra KK-kortet.
Husk på at KK-kortet må armeres ved å sette venstre stikke ned og til høyre (som vist litt over)
Takk 😉
Hei igjen.
Vi har nå lys i radiomottakeren, og disse hastighetskontrollerne spiller sine melodier..
Men vi få ingen lys på KK-kortet. Vi har prøvd å holde spakene i alle retninger i 5 sekunder hver, men får det ikke armert uansett. Vi har også prøvd de tingene dere har skrevet uten hell.
Hva kan være galt? Kan KK-Kortet være defekt?
Heisann!
Jeg sleit også veldig med å få armert KK-kortet med Turnigy 9x, men det gikk til slutt.
Prøv med følgende settings på fjernkontrollen:
Type Select: Heli1 -> Heli2
Modulat: PPM
StickSet: Mode2
Reverse ELE og THR
Dere har Bindet mottaker og kontroller med hell?
Hei, takk for svar!
Prøver dette i morgen 😀
Men hva mener du med «bindet mottaker og kontroller» ?
Har aldri satt sammen noe slikt før, så kan ikke noen ting om slike ting 🙂 Takker igjen for all hjelp!
Fant det ut nå. Måtte bytte til mode 2 på stick mode..
Flott 🙂
Ser fram til å sjå video av det her 😀
dezeen.com/2011/11/24/flight-assembled-architecture-by-gramazio-kohler-and-raffaello-dandrea/
Hei igjen!
Vi har prøvd deres måte å få motorene til å gå synkront, men fikk det ikke til. Så tok vi en titt i manualen til hastighetskontrollerne, og der fant vi mye. Men problemet er at når vi skrur av helikopteret for å sette Yaw-gyoren på 100% igjen, så «resettes» innstillingene.
Det går heller ikke å starte hastighetskontrollerne i denne instillingsmodusen når Yaw er på 100%, så vi vet ikke hva vi skal gjøre. Noen som vet? 🙂
Her må jeg innrømme at vi bare har fulgt oppskriften. Og det har fungert på alle kortene. Men jeg mener å huske at vi måtte gjøre det et par ganger på noen av dem. Det er noe med timing på når du drar ned throttle i forhold til pipelydene som er litt uklart.
Som du har sett er det mange programmeringsmuligheter i selve hastighetskontrolleren, men der har jeg også ganske dårlig erfaring med å få det til å fungere. Jeg har endt opp med å programmere via KK-kortet.
Vet ikke om andre har bedre råd angående synkronisering av motorene?
Jeg lurer på om styrekortet med gyroene må sitte i senter, bare retningspilen peker forover. Funderer på et quadkopter i X, som har en kvadratisk ramme med kamera foran og styring bak. Et batteri på hver side, for å få vekten jevnt fordelt, kan flytte batteriene slik at vekten foran og bak også blir lik. Dette for at sikten fra kameraet skal bli best mulig.
jeg lurer på det med radio, må man gjøre noe med
kk-kortet for å bruke radio med mode2 forhold til radio med mode1.
Set opp radioen for mode 2 så slipper du å spekulere…
Litt treg i starten, men nå har jeg fått bestilt alle «standarddelene» utenom motorer og propeller.
Nå når dere etterhvert har bygget flere varianter med tilsynelatende forskjellige motorer/ propeller/ «prop-savers» eller propellfester, hva bør jeg bestille? Er den orginale motoren og de «litt bedre» prop-saver’ene fortsatt anbefalt å starte med, eller har dere funnet noen bedre kombinasjoner? Er det eventuelt noen andre her som synes de har funnet den perfekte kombo?
Hei! Har akkurat satt sammen en quad med KK Plus v5.5e som skal være lastet med Quad X 4.7. Har koblet sammem quad’en og alt er tilsynelatende i orden, bortsett fra at motor 4 ikke gir like mye effekt som de andre. Noen som har en formening om hva dette kan skyldes?
Har forsøkt å bytte motor og esc, samt gått over innstillinger på esc nok en gang, men problemet ligger fortsatt på motor 4.
Hei Johnny! Hvilke motorer har du kjøpt? Har du kjøpt fra Hobbyking så kan man være så uheldig å ha fått en defekt motor. Derfor bør man alltids kjøpe et par ekstra. Ellers ville jeg ha flashet en gang til på KK-kortet for så og kjørt en kalibrering av potmeterene av esc-er og motorer.
Hei og takk for svar!
Tenkte at det var motor først, men byttet så motor med posisjon 3. Deretter snudde jeg kortet og problemet lå fremdeles i posisjon 4 (bak høyre). Nå har jeg flashet kortet og kan ikke se noen forskjell.
Har et HobbyKing-kort i posten nå, så får se om det løser problemet. Har forøvrig forhåndsbestilt ArduPilot Mega 2.0 også nå:) så det skal nok løse seg..
Men hvis noen har opplevd tilsvarende problematikk tar jeg gjerne imot tips.
Hei,
Jeg har også problemer med motorer som det ser ut til ikke gir like mye kraft.
Jeg ser at du har flashet kortet, har du en beskrivelse av hvordan du koblet til usb-kortet. Det jeg fikk tilsendt sammen med kortet kommer med 4 ledninger, men ingen beskrivelse for hvordan/hvor det skal kobles til KK-kortet. Tips?
Øyvind
Hei!
Jeg kjøpte MKUSB-linker fra http://www.mikrokopter.de – jeg måtte lodde på pins og installere kkplus tool v1.24. Når det gjelder tilkobling er nok ikke jeg rette mann å spørre, men jeg fant ut hvordan det skulle gjøre ved å søke på nettet. Her er link til videoen: youtube.com/watch?v=tWgHoBQX6-Y
Men som sagt så kommer det vel an på hvilket kort og/eller programmerer du har.
Firmware (hex-fil) fant jeg her: fpv.no/vbulletin/showthread.php/850-Guide!-Ny-firmware-til-KKmulticopter.?s=cc9bae059748def6da77622772b76f4b
Håper det var til noe hjelp..
Kan jo også være verdt å nevne at det ikke løste problemet mitt 🙁 så jeg setter min lit til at HobbyKing-kortet løser problemet..
Takk for svar, dette skal prøves ut.
Øyvind
Har det samme problemet med at motor 4 ikke vil gi like mye effekt som de andre og den holder igjen og drar over. Brukket fire proper på dette nå så begynner å bli lei. Noen som har en løsning, flashet med x v4.7.
Bruker du KKPlus-kortet? Jeg bestilte Hobbyking sitt, installerte det, og da funket min som bare det. Bestill med USBasp i samme slengen så kan du laste den firmwaren du vil også.
God jul btw:)
Bruker HK kk- kortet V2 med flasha v 4.7, den porsessen gikk fint med USBasp dongelen. Problemet er nå LØST, nøkkelordet for løsningen er at jeg ikke hadde fått med meg at i v 4,7 er roll, pitch og yaw potmeterne byttet ut med PID (søk på google). Roll er blitt P, pitch er blitt I og yaw er blitt PI. Etter at jeg leste meg litt opp på dette med PID var ikke motor 4 noe problem lengre, enetse nå er å få reversert yaw gyroen når batteriene er ladet igjen. Dette med PID kunne vel nrkBeta skrivd litt om i artikklen, om dere har fått testet v4.7
Les her om PID tuning: rcgroups.com/forums/showthread.php?t=1375728
nå var jo alt alt på plass, trodde jeg, men jeg hadde rota og bestilt feil propeller, så alle er rigga samme vei. i tillegg mangler jeg kabler for å koble sammen radiomottaker med kk-kortet. Sistnevnte finner jeg nok på ELFA i sandakerveien, men er det noen som vet om et sted i Oslo som kan ha propeller? Jeg har bestilt flere fra dealextreme, men har ikke lyst til å vente…..
roy
Erre mulig – her finner jeg modellflynytt.no og radiostyrt.no, etter hva jeg kan se to separate forum styrt av samme person (hva er poenget?), med CAPTCHAer overalt, og med påkrevd manuell godkjenning før en kan stille spørsmål om noe som helst… Er det noen her som vet om et godt, gjerne norsk, og forhåpentligvis litt mer åpent sted enn disse her?
roy
Det er en del forum der man må godkjennes før man kan poste første gangen. Dette er for å kutte ned på spam. Vet ikke om det gjelder på de forumene du nevner. Vet ikke om noen andre forumer.
joda, jeg kjenner til dette, men kombinasjonen overdrevent bruk av CAPTCHAer og så manuell godkjenning på toppen, vitner om at det kanskje burde ha vært bedre mekanismer i sving…
Hei Roy! Hvis du ikke har vært på disse forumene før så er det kanskje ikke rart at du ikke har fått med deg grunnen. Det er som Stig sier at det har vært mye spam men også svært dårlig ordbruk blant enkelte og enkelte emner. Derfor modereres det kraftig til tider på de nevnte forum. Jeg skjønner hvorfor og er faktisk enig i de avgjørelsene de gjør der. Har ikke opplevd «manuell godkjenning» av hva jeg har skrevet og postet der.
Vi er en gruppe elever ved Måløy Videregående skole, som har et prosjekt på gang. Vi skal bygge et RC beltekjøretøy. Det skal være ganske stort ca. 120cm x 80cm. Noe som ligner på dette: youtube.com/user/gedhage#p/u/13/xjBNjKJQthY I den anledning lurte vi på om det var noen som hadde tips til hvor vi kan skaffe en relativt liten likestrømsmotor med en effekt på 500 – 1500w
Hva med motorer beregnet på el-sykler og lignende? De finnes fra 500w og oppover, og burde være mer enn kraftige nok. Du må jo dessuten ha en til hvert belte.
Sjekk goldenmotor.com/ – under BLDC motor finner du mye forskjellig.
Blix
Har du sett på Hobbyking.com? Og hvor «små» vil du de skal være?
Står i del 1 at «Du trenger to høyreroterende og to venstreroterende.»
Men finner ingen steder hvor man skal ha de forskjellige..
Har satt opp motoer 1og4 til å gå motsatt vei av 2 og 3 (som tegningen viser)
Skal man fortsatt ha ulike propeller?
Kanskje litt dårlig forklart ja. Tegningen viser jo bare hvilken vei motorene skal gå. Men: propellene skal være av to forksjellige typer: CW (clockwise) og CCW (counter clockwise). Og de skal monteres slik som vist på tegningen. CW-propellene der pilen går med klokken og CCW-propellene der pilen går mot klokken.
Ofte er propellene som skal gå samme vei som klokken merket med en «R». Og de som går mot klokken er ikke merket med noe annet enn dimensjonene.
Mine propeller heter derfor 10×4.5 og 10×4.5R.
Haha, jeg kjøpe riktige propeller (de som ble anbefalt), men hadde glemt at ikke alle var like…
Sjekket nå og jeg har helt tilfeldig satt riktig propell på alle motorene!
Flaks! (6.25% sannsynlighet!)
vel… det er vel en god del høyere sjanse enn 6,25% – du har bare to typer propeller, ikke 4…
Du har 50% sjanse for å velge rett for 4 motorer.. 0.5^4 = 6.25%…
Om du har fire propeller, to høyrepropeller (H) og to venstrepropeller (V), og disse skal monteres på fire motorer, så har du nok ikke 16 muligheter totalt…
Da har jeg og min far satt sammen helikopteret.
Vi tok en liten test i stua, men fant fort ut at propellene ikke satt ordentlig fast.
Speedet på til det nesten lettet, så gikk en av propellene rett opp i luften. Skal ikke «propsaveren» festet på andre måter enn å skru inn de 2 skruene hardt mot motorpinnen? Virker ikke helt som en sikker løsning når man speeder på fort.
Kan se ut som skruene ikke var skrudd godt nok i mot motorpinnen. 🙂
Det er bare skruene som må trekkes til skikkelig hardt. Vi har også opplevd den klassiske «en-propell-tar-av-for-seg-selv»-greien. Både på bakken og i luften. Sistnevnte er veldig ugunstig…
Så: stram alle skruer skikkelig før hver flytur.
Og for dere som velger å ta av inne i huset: dette er IKKE å anbefale med mindre du har et stort hus. Dette er krafige farkoster og propellene blir direkte farlige når de går på full hastighet. Så hold dere på god avstand når dere flyr!
Jepp, var ikke så ille at vi tok en kjøretur inne i stua. Bare sjekke at alt fungerte osv. Hjalp når jeg brukte et annet skruhjern som var hakket større. Sitter som fjell nå 🙂
Da fikk jeg den første motoren i posten, det kraftigere og tyngre alternativet som ble anbefalt i del 1. hobbyking.com/hobbyking/store/__16229__NTM_Prop_Drive_Series_28_30A_750kv_140w.html
Først nå la jeg merke til at akselen til motoren stikker ut på samme side som ledningene. Altså må man feste motoren på «oversiden». Noen tips til hvordan jeg skal gjøre dette på en elegant måte?
Du har ihvertfall to muligheter. Enten bruker du hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=16719 NTM Prop Drive 28 Series Accessory Pack og lager et hull i ramma til akslingen (det har jeg gjort), ellers så kan du bruke hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=19007 H35 Standoff Motor Mount og montere motorene «normal» vei. Dersom du bruker Standoff Mounts, kan du bruke prop-savers, men det passer ikke på Accessory Pack.
Kan du poste et bilde av hvordan det ser ut når du har benyttet denne motoren slik du har gjort?
Det kunne jeg gjort hadde jeg ikke akkurat dratt på jobb og ikke kommer hjem før i midten av januar…
Da har jeg omsider kommet meg hjem fra jobb og har tatt et bilde som viser to av måtene å montere NTM 28-30. Motoren til venstre henger litt for langt ned fordi jeg hadde ikke korte nok skruer til å feste den ordentlig og ramma er bare festet til armen med tape.
I tillegg til at det kan være kjekt å kjøpe noen ekstra motorer, har jeg funnet ut at det kan være kjekt å kjøpe noen ekstra accessory pack. Propellakslingen på det ene festet mitt var ganske usentrert. Heldigvis har jeg flere i bestilling. Har også tenkt å lage et tricopter, så får jeg se hvordan det blir… 🙂
Link til bilde
imageshack.us/photo/my-images/818/img0458zy.jpg/
Hei.
Nå er det like før jeg gir opp dette prosjektet.
Alt er koblet sammen og snurrer og går, men det ser ut som om motorene ikke går med samme hastighet.
Jeg bruker Turnigy Plush 25A ESC’er og KK Quad X4.7 kontroller, altså i X-konfig. Jeg har lest noe om at ESC’ene må kalibreres, men skjønner ikke helt hvordan det skal gjøres. Skal de kalibreres en og en koblet direkte til mottaker, uten kontrollerkortet tilkoblet, og hvordan blir dette når det er i X-konfig?
Noen som har tips?
Hilsen
Øyvind
Syntes ikke du skal gi opp! Det er ikke langt igjen nå.
ESC-ene må kalibreres. Og det gjøres som beskrevet i artikkelen:
-Skru Yaw-pot til null (helt mot venstre).
-Slå på fjernkontrollen.
-Dra throttle helt til maks.
-Koble på batteri (slik at KK-kortet får strøm).
-Vent til motorene piper to ganger etter at de er ferdige med sine innledende pipelyder.
-Dra throttle helt ned. Da skal motorene pipe igjen.
-Trekk ut batteriet igjen.
-Skru Yaw-pot tilbake til maks.
Dette er uavhengig av om du kjører X-konfig eller +-konfig.
Hei, og takk for tilbakemelding.
Jeg har allerede prøvd dette flere ganger.
Etter at batteriet er koblet til med throttle på max og yaw pot på min så kommer den vanlige melodien: «pip-pip-pip—-piip-piip-piip—-piiiip».
Etter det blir det stilt, og det kommer ikke to pip som indikerer at throttle skal draes helt ned. Hva kan det være jeg gjør feil?
Øyvind
Her er en video som viser prosessen. Det er ikke så nøye at fyren snakker russisk. Han viser ganske tydelig hvordan det hele foregår: vimeo.com/23193817
Om du fremdeles sliter kan kanskje et programmeringskort hjelpe deg? Se min kommentar til Roy Sigurd Karlsbakk lenger nede.
Vil bare nevne at om man har Mode 1 kontroll, så er det ikke Throttel som skal skrues ned til høyre, men Elevator. Forsatt venstre spak, som vist på bildet da. 🙂
Det er ikke riktig. Det er throttle (gass) og rudder (sideror) som skal brukes til dette, uavhengig av hvor de er plassert på senderen.
Hva er best ut av et tricopter eller en quad? hvorfor? hva er lettest og fly med? hva er forskjellene, foruten at den har 3 motorer da?
Et quadcopter er lettere å bygge (fordi du ikke trenger servomekanismen til den bakre motoren). Et quadcopter kan også bygges kraftigere med mer løftekraft fordi du har fire motorer.
Et tricopter er lettere å orientere i luften fordi det er større forskjell på hva som er bakover og hva som er fremover. Tricopteret trenger ikke to forskjellige typer propeller.
…men her er det nok mange meninger og preferanser der ute. I noen diskusjoner virker det nesten som om det er to forskjellige leire. Quad-folkene og Tri-folkene…
hrmf… nå er alt koblet, etter hva jeg kan se også riktig, kontrollerern armerer seg, men samtlige ESC-er piper do-re-mi (pause 1,5s eller så) og så pip-pip-pip-pip-pip….. (samme tone som «do» i do-re-mi først) uten stopp
roy
Jeg fikk det samme problemet da jeg skulle teste min quad med CopterControl-kortet mitt første gang. Den kom med samme pipende innledning og så uendelig pip-pip-pip…
Problemet er at quad’en tror at throttle ikke er satt til null. Tror det er en sikkerhetsmekanisme i ESC’ene. For at du ikke skal risikere full fart på propellene når du setter i strømmen.
Jeg brukte timesvis på å prøve å kalibrere ESC’ene slik det står beskrevet i bruksanvisningen. Masse voodo med fjernkontrollen og forskjellige melodier. Fikk det ikke til.
Så satte jeg KK-kortet tilbake i Quad’en og kjørte throttle-range-kalibrering en gang til med kortet. (Yaw-pot til null osv).
Når jeg så satte i OpenPilot-kortet igjen fungerte det plutselig.
Jeg har med andre ord hatt suksess med denne kalibreringen fra KK-kortet stort sett hver gang. Men ser at folk også bruker spesielle programmeringskort for å sette opp ESC’ene. For eksempel dette: hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=2169&aff=61689
Kanskje det kan hjelpe?
Det er jo for kjipt om vi har flere her som har bygget helt ferdig men gir opp fordi de siste detaljene ikke kommer på plass…
Hei!
Prøv å trimme trottelen helt ned. Det hjelpte meg.
Takk for en interessant og lærerik artikkelserie! Da har jeg endelig mottatt det meste som trengs for å bygge et quadcopter.
Jeg sliter imidlertid litt med å få tak i furulister i riktig størrelse. De fleste stedene jeg har lett har de bare lister som er for tykke. Det må da finnes noen fysiske butikker i Oslo/Osloområdet som har furulister i riktig størrelse (15x15mm og/eller 10x10mm), slik at jeg ikke behøver å bestille det og få det tilsendt med Posten? Hvor har NRKBeta og NRKBetas lesere fra Oslo fått tak i sine lister og finerplater?
Jeg kjøpte 12×12 og finerplater hos Maxbo på Vækerø. 15×15 tror jeg blir litt tungt. Maxbo hadde ikke 10×10 da jeg var innom, men ellers er sikkert det også helt fint.
Sjekk nøye for kvist og unøyaktigheter.
Strålende!
Jeg var en tur innom Maxbo på Alna for noen uker siden, men da lette jeg sikkert bare på feil sted (hvis det ikke var midlertidig utsolgt eller noe slikt). Jeg får ta en tur til og se.
Jeg kjøpte cirka 50x50cm på maxbo og saga opp resten sjøl. De skulle ha 30 kroner eller så for jobben å kappe, men tok ikke noe for fjøla.
Det står 15×15 i handlelista 🙂
Det har du rett i! Takk for påminnelse.
Vi har testet mye forskjellig. Den aller mest stabile riggen vi flyr nå er faktisk 15×12. Men må innrømme at etter MYE krasjing med en av riggene som er 12×12 uten antydning til svikt i armene, så kan vi anbefale det også. Og til og med 10×10 om du føler deg dristig.
Jeg har nå oppdatert artikkelen med denne informasjonen.
Og for dem som har kjøpt 15×15: det flyr helt fint! Det er solid og gir enda bedre støtte til motorene enn 12×12.
Har du prøvd SmallSize på Lilletorget eller i Skovvn? De har jo kvalitetene man trenger for modellbygging.
Tips: Lim og skru sammen to eller flere tynnere lister, det blir langt mer stabilt!
Blix
Hei
Takk for en flott artikkel serie håper det kommer mer har endeligt fått alle delene. Ser at du har gått over til OpenPilot-kort fra KK-kort,er dette et betre kort (enklere) å fly med for en novice?
Vi har lyst til å teste forskjellige kort. OpenPilot har aksellerometer i tillegg til gyroer. Noe som gir enda bedre stabilisering. Så det er et hakk lettere å fly ja. Men det koster 95 euro i stedet for 24 dollar. Og så er det nesten alltid utsolgt.
Et alternativ som også har aksellerometer er de relativt billige MultiWii-kortene som har kommet på markedet: goodluckbuy.com/mwc-multiwii-se-standard-edition-4-axis-flight-control-board-quadx-w-ftdi-basic-brea…
…men disse har ikke vi noen erfaring med ennå.
Vil fremdeles anbefale å begynne med et KK-kort fra hobbyking. Det er billig, skal være ganske enkelt å sette opp og gir deg en god følelse av hvordan det er å fly Quad.
Takk for hurtig svar,jeg har kjøpt inn KK-kortet så jeg kommer til å starte med det får prøve hvor vanskelig det er.Jeg flyr simulator med GUI 330 det fungerer bra så det skal bli gøy å prøve prosjektet
Bruker HK kk- kortet V2 med flasha v 4.7, den porsessen gikk fint med USBasp dongelen. Problemet er nå LØST, nøkkelordet for løsningen er at jeg ikke hadde fått med meg at i v 4,7 er roll, pitch og yaw potmeterne byttet ut med PID (søk på google). Roll er blitt P, pitch er blitt I og yaw er blitt PI. Etter at jeg leste meg litt opp på dette med PID var ikke motor 4 noe problem lengre, enetse nå er å få reversert yaw gyroen når batteriene er ladet igjen. Dette med PID kunne vel nrkBeta skrivd litt om i artikklen, om dere har fått testet v4.7
Les her om PID tuning: rcgroups.com/forums/showthread.php?t=1375728
Hei,
Eg har nett bygd meg eit Quadrokopter basert på byggebeskrivelsen i nrkbeta. Ein glimrande byggebeskrivelse spør de meg. Takk nrkbeta. Mitt problem er at eg testa quadrokopteret for første gang i dag etter at det var komplett ferdig. Alt fungerte glimrande. Hovra fint og roleg ein meter over bakken etter litt justeringar. Så skulle eg vise fram prosjektet for nokon i RCklubben ein time seinare og då fekk eg ikkje liv i KK kortet. Det er eit lite raudt blink i LED lyset med det same eg koblar på batteriet og deretter er det daudt. Kva kan dette skuldast? Har sjekka på kryss og tvers om det er dårleg kontakt nokon plass utan å finne noko.
Fann ut av problemet på eigen hand. Det var berre ein banal feil.
Det kan sikkert være fint om du skriver hva som førte til dette, selv om det var så banalt at du syns det er flaut kan sikkert andre komme opp i samme situasjon
Javel då. Det som var feilen var at eg hadde bytta om på kva retning motorane skulle rotere. To roterte den eine vegen og to den andre men dei skulle vere motsatt. Helikopteret letta for eg hadde montert propellane rett i høve rotasjon, men då eg testa det første gongen såg eg at ror-retning var feil så eg reverserte dette på radioen. KK kortet gjekk då i vranglås og eg fekk det ikkje til å virke slik det gjorde før dette vart gjort. Fann feilen på grunn av den detaljerte byggebeskrivelsen.
Jeg ser at stort sett alle flasher kk-kortet for å få X-konfigurasjon på quad’en sin. Jeg skjønner jo at det ser mye tøffere ut, men er det noen som har gjort sammenlignende tester på X og + flyvning?
Jeg skulle likt å vite hva forskjellene i flygekarakterestikker er.
Hvem flyr fortest?
Må både X og + tilte like mye for å fly fremover?
I teorien burde + bruke litt lenger tid på å tilte, betyr det at den vil bruke lenger tid på en oppbremsning fra full fart forover til stillstand?
Kan noen av de tilte for mye slik at quad’en flipper rundt og går i bakken?
Er det i det hele tatt noen som kan fortelle meg hvilke forskjeller det er på flyvningen til de to konfigurasjonene.
Alle detaljer og synspunkt av interesse. Har lyst til å fly rundt med kamera og er vil gjerne ha en så smooth og vannrett tur som mulig.
Og en ting til. Karlsbakk: Har du laget noen sånne kort selv? I så fall er jeg interessert i å kjøpe fra deg, man må jo støtte opp om lokalt initiativ 🙂
Har ikke fått laga noen sånne (ennå). Jeg spurte i en tråd på forums.openpilot.org/topic/7469-eta-for-cc-hardware/ om tilgjengelighet og eventuelt hvordan de stilte seg til at noen laga nye og ble flama ut på vidda – ser ut som om det er en og annen hårsår person der inne… Der står det uansett at nye kommer om «et par uker» regna fra slutten av november, selv om EU-sjappa fremdeles lister dem som ute av lager.
Om det ikke skjer noe snart, vil jeg sjekke mer på jobb hva som skal til for å lage et slikt 4-lagskort – vi har en og annen der som er rimelig oppegående på elektronikksida (der jeg mangler endel) og kan tegne et nytt kort om nødvendig (jf lisenser osv).
roy
Vet ikke om jeg vil være helt enig i at du ble flama helt ut på vidda av noen hårsåre personer. Det blir gjerne slik når man ikke leser helt hva som blir sagt og hva som er sagt flere ganger tidligere og terper på det samme om igjen og om igjen… 🙂
Når det gjelder email-varsel, så skjedde det samme for noen måneder siden også når det kom inn kort. Tror man egentlig bare må følge med på forumet og se når det kommer inn kort igjen istedenfor å stole på email-varselet.
Får vel sørge for at brødristerloddestasjonen min kommer opp og gå når jeg kommer hjem fra jobb slik at jeg kan få lagd meg noen kort… 🙂 Alle komponentene ligger ihvertfall hjemm og venter og kortene er vel snart på vei.
Ja da var den ferdig bygd,og satt med x software .
Men den vil ikke armeres piper som den skal men ikke noe repons .Fikk en Hitec Eclipse 7 fjernkontroll som jeg ikke forstår så veldig mye av , tips motas gjerne .Blinker en gang i led lampa på kortet når jeg setter på strømmen ..
Hilsen frank
Var borti noko liknande med + oppsett. Sjå her: Det som var feilen var at eg hadde bytta om på kva retning motorane skulle rotere. To roterte den eine vegen og to den andre men dei skulle vere motsatt. Helikopteret letta for eg hadde montert propellane rett i høve rotasjon, men då eg testa det første gongen såg eg at ror-retning var feil så eg reverserte dette på radioen. KK kortet gjekk då i vranglås og eg fekk det ikkje til å virke slik det gjorde før dette vart gjort. Fann feilen på grunn av den detaljerte byggebeskrivelsen.
Vurderer å kjøpe DT750 motor. Forstår ikke hvordan propellen festes. Jeg ser at man bruker låsemutter men hva holder propellen fra å gå inn i motorhuset og «låse» seg.
Hvis denne motoren er så bra så virker det også litt rart at det ikke finnes propeller som har 4mm hull.
Er det standarkontakt for radiomottagere (hun Servo Lead) Finner heller ikke ledninger som er hun-hun noe som er rart hvis dette er normalen.
Hva står AWG for? Kan jeg bruke 22AWG Servo Lead istedet for «26AWG som dere har brukt?
Denne motoren er en ‘outrunner’, dvs at motorhuset roterer sammen med akselen, så det er helt riktig at propellen går ned på motorhuset og låses med en mutter.
Standardkontakt for radiomottagere er 3-pin han på mottageren og hun-kontakt på servo/ESC.
AWG står for American Wire Gauge, og jo høyere nummer, jo tynnere kabeltykkelse. Ja, du kan bruke 22AWG istedenfor 26AWG, den er bare litt tykkere.
Angående servokontakter – dette skrev jeg til en som spurte om det samme i del 1 :
Jeg tror at du kan bruke disse :
sparkfun.com/products/10363
sparkfun.com/products/10368
sparkfun.com/products/10373
Jeg tror også at du kan nøye deg med å bruke to av dem – en for signal/pluss/minus og en for 3xsignal
Legg merke til at jeg skriver at jeg *tror* dette – jeg har ikke prøvd dem selv og det er jo ikke sikkert at det passer i begge endene.
Da har jeg bygd mitt første kopter, og fant at kombinasjonen med de anbefalte motorne, noen 9×5-propeller som kanskje ikke var helt optimale og en litt vel tung farkost, førte til at jeg ikke akkurat har fått den til å fly helt optimalt. Etter hva jeg kan se videre, finnes det en dullion prosjekter med ymse programvare og maskinvare, og etter hva kunne fortelle meg på #oslohackerspace @ irc.freenode.net, så var kk-kontrolleren noe av det mindre bra han kunne tenke på, siden «den prøver å brute-force alt, og mangler aksellerometer, slik at den ikke stabiliserer, bare assisterer. Så – jeg tror kanskje det blir å prøve noe litt mer ferdigsnekra neste gang, noe med gyro, aksellerometer, gps og magnetometer og barometer for å kunne vite noe om høyde uten å hente dette fra GPS. Jeg tenker da på noe sånt som diydrones.com/profiles/blogs/apm-2-0-release
Å kjøpe et kit som store.jdrones.com/product_p/ackit2.htm eller tilsvarende kan kanskje virke dyrt, men erfaringsmessig kan det fort bli vel så dyrt med listverk-og-gaffa-og-tyggegummi-metoden, samt at en ferdig farkost er mye lettere å kalibrere mot osv.
Så, jeg regner med at jeg hører fra meg når jeg får kloa i noe sånt, og forhåpentligvis en Turnigy-radio.
Det var litt fint som _fishy_ sa det, at kk-kontrolleren er såpass billig at det ikke føles så vondt å kaste den…
roy
Hva med å selge det du har? (eller optimalisere den med lettere utstyr, bedre propeller og evnt. sterkere motorer) Men det har du nok tenkt på allerede.
Jeg skal begynne å bestille snart. Hvilke motorer (av de tre nevnte) brukte du?
Tja… Det jeg har å selge, er i tilfelle et sett 9×5-propeller, én god motor, tre ikke fullt så gode motorer og en kk-kontroller, og kanskje en HobbyKing-radio, dvs ikke så mye å skryte av. Resten (batterier, lader, ledninger, kontakter, plugger, sukkerbiter og sånt) er kjekt å ha til neste forsøk. Og igjen, jeg tror kanskje andre også har mer glede av å begynne med litt mer enn det her. Personlig planlegger jeg å koble opp et pandaboard eller en tilsvarende SoC mot farkosten for å få god med lett programmerbare muligheter og muligens en SPI-buss ned til kontrolleren for å lese av status derfra. Så kommer kameraer og alskens moro i tillegg…
roy
Hvilken type motor har du brukt?
1. 2213N 800kv
2. HexTronic DT750
3. NTM Prop Drive Series 28-30A 750kv / 140w
Greit å vite hva man skal unngå av motor.
Dette virker som et godt prosjekt for meg siden det meste som blir sagt utenom er fullstendig gresk for en nybegynner 🙂
Hvilken type motor har du brukt?
1. 2213N 800kv
2. HexTronic DT750
3. NTM Prop Drive Series 28-30A 750kv / 140w
Greit å vite hva man skal unngå av motor.
Hei
Har brukt det meste på guiden og følgt den slavisk, kjører på X konfig.
Men armering av KK kortet fungerer ikke for meg. Har prøvd alle mulige måter, med reversering av alle 4 kanalene.
Motorene går igang og gir respons når jeg drar opp og ned på throttle, ellers er det ingenting som skjer. Hva er feil?
Har sjekka alle koblinger og det ser bra ut.
Bruker en transm og reciev som jeg tadd fra en krascha (propeller-festet gikk av, ikke noe større krasch) E-sky heli. 4 kanaler transmitter ESKY HOBBY ET4 2,4 ghz, 6 kanaler reciever ESKY EK2-0426 2,4 ghz.
Fikk det til å fungere. Hvis noen annen har samme problem, så kan det fikses på denne måten:
Trekk ut batteriet, skru alle tre potmeteran til maks, koble alt på igjen, og armer KK kortet. Skru tillbake potmeteran til det du hade før. Da går det å disarmere og armere som vanlig.
Hoi!
Dårlig med bilder her i kommentarfeltet! Er det ingen som vil vise fram sitt fantastiske byggverk? 🙂
Enig. Bilder! Post på Flickr og YouTube og post linker her. 🙂
Latstaurvarianten: youtube.com/watch?v=JlbjceJV9jU&feature=related
Ja. AR-dronen er en herlig sak. Funker ut av boksen med kamera og det hele. Så vidt jeg har skjønt løfter den en GoPro også.
Men lite fleksibel, litt begrenset rekkevidde, tåler ikke så mye vind og av en eller annen grunn diverse tannhjul og unødvendig mekanikk rundt motorene.
Er dette en ok radio for en nybegynner? elefun.no/p/prod.aspx?v=17528 Eventuelt denne? elefun.no/p/prod.aspx?v=15771 Da har man vel en kanal ledig til f.eks servo til shutter control etc?
Ville uten tvil lagt på den ekstra femhundrelappen og gått for Hitec Eclipse. Det er en computerradio med veldig mange flere muligheter enn DX5.
Takk for svar.
Hva får jeg for «mange andre muligheter?» Og, evnt, er det andre radioer du kan anbefalle i denne prisklassen?
Jeg har ikke så mye erfaring med radioer. Men hos oss er de som har fått tak i Turnigy-fjernkontrollen vi har anbefalt i denne artikkelserien godt fornøyd. (Kommer på noen hundrelapper ferdig levert i Norge, men er desverre ofte utsolgt hos HobbyKing)
Når det gjelder hva du får, så er det slik at den såkalt datastyrt radio gir deg mange flere muligheter når det gjelder å tilpasse styringen til den enkelte modell. Den husker innstillinger og du kan bruke den til å styre forskjellige modeller uten å måtte sette den opp fra grunnen av hver gang.
Hei Takk for en flott byggetråd!
Jeg har to spørsmål jeg håper jeg kan få hjelp til. Jeg ønsker en så stabil Quad som mulig.
Er det noe i veien for øke plankelengden til 100 cm mellom motorene?
Og så har jeg kommet dit at jeg skal bestille kort. Og hva bør jeg kjøpe? Open pilot? KK kortet? Eller finnes det ett annet kort som hjelper å holde den i «hovremodus»?
Morten
Jeg har nettop mottatt en Dji Naza. Den koster VESENTLIG mer enn KK, men mine små tester så langt er meget imponerende. Med Naza føles det som om quad’en hviler på en usynlig luftpute. Og den fungerte imponerende bra rett ut av boksen uten noen form for trimming eller avansert konfigurering. Den kommer med USB-kobling og programvare for Windows. Det var lett å sette opp fjernkontroll, flymodus, batterialarm og det hele i programvaren.
Men i stedet for 24$ må du ut med 220$ + 40$ i frakt og NOK 250,- i toll og avgift.
Jeg er ikke supererfaren, men sammenlignet med KK og OpenPilot er Naza både enklere å sette opp og MYE mer stabil og enkel og fly.
Jeg kjøpte den her: djiusa.com/shop.html
Godt å høre at du har gode erfaringer med DJI Naza, har en slik i posten.. Planlegger med å bruke den til FPV med et quadkopter inspirert av denne guiden. Flyr nå KK Quad v4.5 i + med Eagle Tree OSD Pro og GoPro som FPV-kamera. Ser frem til å få en mer stabil kontroller med altitude hold og stable mode. Tar gjerne imot tips og erfaringer etter hvert som du gjør deg noen:)
Ellers så kan jeg nevne at jeg nettopp har oppgradert min Turnigy 9x med LCD backlight fra Hobbyking og kjøpt et 1800 mah Zippy LiFePo battery på 9.9V.. Batteriet passer rett inn i batterirommet og det ser veldig bra ut. Venter også en FrSky modul så snart den kommer inn på laget, skal visst nok gi minst 1,5 km rekkevidde.. Enkle grep man kan gjøre hvis man vil ha mer ut av radioen.. Finnes også flere utgaver av alternativ firmware til radioen for de som ikke er imponert av den originale utgaven..
Et par bilder av min sammenleggbare quad..
Bilde 1
Bilde 2
Den så heltøff ut. Hvordan har du laget «hengslene» for å gjøre den sammenleggbar. Har du noen bilder av den løsningen?
Hei!
Jeg har brukt deler fra et Biltema tørkestativ, og brukt et skjærebrett fra Biltema som senterplate.. Jeg har en hel stang som er poppnaglet fast i skjærebrettet. De to armene som kan legges sammen er festet med en gjennomgående bolt inne ved senter. I underkant har jeg brukt en skive og stoppmutter. I tillegg har jeg drillet hull helt i ytterkant av platen, slik at jeg kan fiksere armene med en tynn m3 bolt med stoppmutter. Dette er kun for å sikre at armene ikke kan forskyve seg i luften, og sikre at vinklene blir de samme hver gang jeg folder rammen ut. Fungerer meget bra så langt..
Jeg leste i går om DJI Wookong-M brukt av David Windestål i rcexplorer: rcexplorer.se/projects/Y6/Y6.html som også ser veldig bra ut, men som er enda dyrere enn Naza. Ved hjelp av gps-en kan et quadkopter med denne kontrolleren komme tilbake til der den startet og automatisk lande om den mister kontakten med senderen. Eller så ser det ut som om multiwii-kortene (multiwiicopter.com/) ligger mellom kk-kortene og DJI-kortene i pris.
Kult. Bestiller en selv.
Flyr man i X eller + modus? Webshoppen demmes virker litt ‘amatør’ aktig, men siden du har kjøpt derfra, så er det vel ‘safe’ 🙂 Hvor lang tid tok det før du fikk NAZAen?
Hei Morten! Det er ikke noe i veien å øke armlengdene til 100cm. Blir avstanden for stor vil du risikere at Kontroller-kortene ikke reagerer raskt nok til å komme med korreksjoner og dermed krasje. Men det er uproblematisk med 100cm. Go for it. Post bilder og gjerne videoer av ferdig resultat og flytur.
Hei
Takk for all hjelp!!
grunnen til at jeg ønsket litt større avstand mellom motorene var at jeg håpet den ville bli litt mere stabil og lettere å fly FPV. Kommer til å bestille ett kort som er selvopprettende. Bygger rammen nå og resten av delene er på vei fra Hobby King.
Bilder kommer 🙂
Gleder meg veldig til å bli ferdig!
Har tidligere fløyet rc helikopter. har veldig lyst til å prøve meg på FPV! Og er veldig takknemelig for den flotte hjelpen jeg har fått her 🙂
Morten
Valget falt til slutt på en spektrum dx6i radio. Skal heller ikke se bort fra at jeg bestiller den fra turnigy etterhvert. Nå kommer nok snart alt jeg trenger fra HK. Spennende og se om man fikser det:) allerede begynt og planlegge neste prosjekt. Hexacopter:)
Hei, jeg har jobbet med å lage ett quadkopter sammen med Odd-Håkon som har postet her før. vi har fortsatt problemer med å få motorene til å starte på likt.
vi har fått motorene til å starte på likt i «program» mode, men nå vi slår alt av og på igjen og armerer KK-kortet sviver de forskjellig igjen. vi har gjort dette MANGE ganger og får det ikke til.
noen som har noen forslag til hva vi kan gjøre for å få de til å svive likt?
vi har også hatt problemer med å få reversert YAW-gyroen. når vi har fått det til å fly litt snurrer det bare. men vi har ikke fått til å reversere gyroen. kan det ha noe å gjøre med at vi ikke har klart å synkronisere motorene?
takker for svar på forhånd 🙂
Hei Øyvind! Synd dere har problemer. Men det kan hjelpe å flashe kortet igjen, hvis dere ikke har 4.7 versjon så gjør det nå. Etter flashing så kalibrerer dere ESC-ene på nytt og prøver igjen.
YAW-gyroen: Sett i deres tilfelle alle pot-ene i null (husk at med 4.7 versjon så er pot-ene reversert med tanke på Null-pkt) og kalibrer.
Si fra hvis dette ikke funker da.
Petter
—
Hei.
Har et par nybygger spørsmål. Har satt sammen alt som beskrevet på disse sidene, håper jeg. Men kk-kortet vil ikke armere. Dioden på kortet blinker i det jeg kobler på batteriet og esc-ene låter som de skal. Eneste gangen motorene gikk rundt var når jeg foretok en «2. Calibrating the throttle range on the ESC’s» som vist her rcexplorer.se/Educational/kkguide/kkguide/quad.html
Men da lyser ikke dioden, og det går heller ikke å av-armere. Jeg har en Spktrum dx6i mode 1(throttle til høyre). Og, for å få motor 2 og 3 til å gå ccw, må disse fysisk snues(bytte ledninger), og kk-kortet styrer kun hastigheten, eller skal kk-kortet også styre retningen på motorene?
For å bytte retningen på moteren, må du bytte om på ledningene, og kk-kortet styrer kun hastigheten.
Hvis du ikke er vant med Mode 1, er det anbefalt å bytte om til Mode 2. Med DX7 og DX8 er det lett, men det er mulig med DX6i også. Bare litt mer tungvint.
Kan ikke hjelpe deg med armeringsproblemet siden jeg ikke har kommet så langt selv ennå… 🙂
Det er ikke noe problem med mode 1 for min del, så lenge det ikke skaper problemer me kk-kortet.
Ser ut som throttle kun virker med yaw på 0, eller vil det si at potmeteret er reversert?
Men fortsatt ikke mulig å av-armere, og dioden på kk-kortet er fortsatt like mørk. Den flasher en gang mellom de første og de midterste 3 pipene. Og for hvert pip kommer det rykninger i motorene.
Svarer meg selv. Selvfølgelig må throttle(høyre kontroll) og rudder(venstre kontroll) brukes (himle med øynene). Men jeg er sikker på at jeg prøvde dette tidligere…
Men nå virker det 🙂
Eirik Solheim; Kanskje du kunne ha laget en ny video snart med det nye utstyret du bruker? Med Diju Naza osv. 🙂
Må vel innrømme at vi driver med utstrakt eksperimentering fremdeles. Bytter ramme, motorer og kontroller frem og tilbake… Men er enig i at vi etter hvert har nok erfaring til å gjøre en skikkelig oppdatering av denne artikkelen.
Hovedproblemet mitt er fremdeles at jeg får vibrasjoner og jello-effekt i video filmet med GoPro. Skal oppdatere og melde tilbake når ting er på plass.
Hei,
Er det noen som har en god instruks på hvordan kalibrere hastighetskontrollerene til å synkronisere motorene?
Esc’ene skal avgi 2 pipelyder etter de innledende pipelydende, men dette skjer jo på forskjellig tidspunkt på de respektive Esc’er, er derfor vanskelig å vite når throttle skal ned.
takker på forhånd for svar.
Men altså:
Jeg ser at stort sett alle flasher kk-kortet for å få X-konfigurasjon på quad’en sin. Jeg skjønner jo at det ser mye tøffere ut, men er det noen som har gjort sammenlignende tester på X og + flyvning?
Jeg skulle likt å vite hva forskjellene i flygekarakterestikker er.
Hvem flyr fortest?
Må både X og + tilte like mye for å fly fremover?
I teorien burde + bruke litt lenger tid på å tilte, betyr det at den vil bruke lenger tid på en oppbremsning fra full fart forover til stillstand?
Kan noen av de tilte for mye slik at quad’en flipper rundt og går i bakken?
Er det i det hele tatt noen som kan fortelle meg hvilke forskjeller det er på flyvningen til de to konfigurasjonene.
Alle detaljer og synspunkt av interesse. Har lyst til å fly rundt med kamera og er vil gjerne ha en så smooth og vannrett tur som mulig.
Hvis du flyr med X, får kameraet ditt bedre utsikt fremover…
Ventar på delar i posten. Så langt har eg oppdaga at utselt og venting og backorder er stikkord i denne bransjen.
Fyrste kopteret blir omtrent som basismodellen her. Men vidare planlegging av neste generasjon er allereie i gang og eg tenkjer på kva for eigenskapar ein vil optimalisere. Fart, løftekraft, stabilitet, autopilot, flytid… Eg opnar dermed til diskusjon om kva de meinar manglar i den enkle versjonen som er bygd her.
Hm. Har laget quad’n helt etter oppskriften. Har et HK kort(v.2.1) som da er +. Motorene er festet i riktig rekkefølge. Motorene går riktig vei og riktig propell er montert på riktig motor. Motorene starter også likt. Jeg tror jeg har sjekket det meste(yaw gyroen måtte reverseres). Når jeg letter (bruker kun throttle) tar den av i fullfart fremover til venstre, hvis jeg bruker en del throttle. Er jeg mer forsiktig vipper den over mot samme side. Hvis jeg kjører mye throttle letter den rett opp 5-10 cm før den som sagt tar av fremover til venstre. Har jeg oversett noe eller er det noen som har tips om hva som må gjøres? Jammen glad det er mye snø nå så den fortsatt er like hel 🙂
Hmm. Kan det være at kortet ikke er montert med pilene riktig? Som vist her: nrkbeta.no/wp-content/uploads/2011/10/PA121164.jpg
Nei, kortet er montert med pilen rett mot motor #1. Jeg har også prøvd å holde quad’n i hånda og vippe den til forskjellige sider, men det er omtrent umulig å høre hvilken motor som øker i turtall. Jeg får bare starte på scratch igjen og se om det hjelper.
Har lastet opp denne som viser hva som skjer. Her øker jeg throttle sakte, uten å røre noe annet. Har også kryssbyttet motorene i et hjelpeløst forsøk på feilsøking. Er det noen mulighet til å «nullstille» KK-kortet slik det var originalt? Har prøvd så mange muligheter at jeg snart er usikker på hvilke innstillinger jeg har. Tror muligens noen potmetre er snudd, men når jeg prøver å endre dette blir det problemer med å armere farkosten. Flyr nå med alle på 50%, men har tidligere hatt yaw på 100% med samme resultat. Men jeg har uansett bestilt USB programmerer for å laste inn X 4.7 versjonen, så får vi se hva som skjer da.
Også har jeg reversert rudder for å armere mot høyre, men da ser det ut til at rudderet virker motsatt. Det vrir seg mot klokken når jeg kjører spaken til høyre. Har også prøvd å vippe quad’n forskjellige veier, og det ser ut til at de riktige motorene øker turtall når de skal.
Ser det forsøket på link ikke funket. Prøv vimeo.com/37461773
Til Tom,– har opplevd nøyaktig det samme, men i mitt tilfelle enda det med krasj, knekt ramme, er godt i gang med å bygge ny, denne gang med med ein gammal t-v-antenne som basis, enn så lenge kjekt, verre er det at ein så langt er heilt blank når det gjeld å finne ut av årsaka — tenkjer kanskje at ein av dei andre gyroane treng reversering, trur eg vil prøve det når eg er «startklar» att.
Hadde akkurat det samme i går når jeg endelig hadde fått koblet sammen alt sammen. Først ville den bare snu til siden, men etter at jeg fikk snudd Yaw-gyroen, roet det seg. Bare til opplysning, indikasjonene er litt annerledes på 4.7 enn det som står lenger opp i artikelen.
Etter det ville den hele tiden gå bakover når jeg ga litt gass, så jeg også tenkte at kanskje Pitch-gyroen også måtte snues. Det måtte den ikke…! Resultatet, siden jeg satt på gulvet rett ved Quad’en, var en stk veldig kjapt snudd Quad, 2 knekte propeller, et rapp i låret fra den ene propellen og en knekt antenne på radioen… Quad’en er ganske bra balansert, både i pitch og roll, så jeg vet ikke hvorfor den absolutt ville gå bakover.
[…] har tidligere vist dere hvordan man kan bygge sitt eget quadkopter (del 1 og del 2). Neste skritt er naturligvis å feste et kamera på farkosten. Lars Petter Lorentzen har tatt det […]
Jeg har satt sammen quaden min, men får ikke motorene til å starte på likt. KK-kortet er fra HobbyKing, med v2.1. Men når throtler hakk for hakk på radioen min, starter først motor 2 og 3 på likt, deretter m1 og til slutt m4. Disse kommer i hvert nye hakk jeg throtler.
Jeg har prøvd det som står ovenfor 10+ ganger, men ser ingen endring. Det som er forskjellig hos meg i forhold til det jeg leser/hører hos andre er at mine hastighetskontrollere piper i utakt. Jeg klarer ikke si hvilke som piper først og sist, men synkront er det ikke. Kan dette være en feil? Bør jeg byte dem? Hvor likt skal motorene starte?
Hmm. Mener at ESCene har pepet synkront på quadene jeg har satt sammen. Men aner ikke hva som kan være årsaken til at dine ikke piper synkront når du plugger i strømmen.
For å få en oversikt over hvordan innstillingene på hver ESC er kan du eventuelt kjøpe et programmeringskort. Men er usikker på om det vil løse problemet ditt: hobbyking.com/hobbyking/store/__2169__TURNIGY_BESC_Programming_Card.html
Det brukes for å sette og sjekke innstillinger på en ESC, men jeg har ikke hatt bruk for det på noen av farkostene jeg har satt opp.
Du bør sjekke at alle ESCene er av lik type. Hadde samme problem som deg, og oppdaget at det var forskjell på ESCene. Det som skilte dem var den kondensatoren som stikker ut på denne siden. Dette gjorde at de pep 2 ganger på forskjellig tidspunkt.
Jeg kjøpte alle fra Hobbyking. Denne typen: hobbyking.com/hobbyking/store/__6457__Hobbyking_SS_Series_18_20A_ESC.html
Hender det at samme modell har ulike komponenter? Det er uansett ganske enkelt å sjekke…
Eit kjapt lite spørsmål om dreieretninga på motorane, (i+-oppsett), her i byggeloggen er dette teikna akkurat motsett av beskrivelsen i Hobbyking sin manual til kk.kortet,kva er rett,?–og er teikningane «sett» frå over/ eller undersida av quadcopteret?
Takk for info. Har nå oppdatert artikkelen. Konklusjonen er at forskjellig programvare krever forskjellig retning på motorene. Og her må dere rett og slett følge med i manualen til det kortet dere har bestillt.
Om dere ender med feil retning vil farkosten bare spinne fortere og fortere rundt sin egen akse. Da kan dere reversere Yaw-gyro eller bytte rotasjonsretning på motorene.
Mer info i oppdateringen av artikkelen.
Hei, vi har følgt byggeveiledninga og hatt vår første testtur der quad’en roterte sakte mot venstre. Prøvde så prosedyren for å reversere rudder gyro. Då starta problema, når vi rørte stikke på rudder-kanal ville ikkje ledlampa på kk-kortet lyse. Etter dette har vi helle ikkje klart å armere kortet. Koblar vi til batteri vil throttle stikka få igang alle motorane og dei er synkrone, men ledlampa på kortet lyser ikkje og ingen av dei andre kanalane virkar inn. Det som er rart er at dette funka før vi prøvde å reversere gyro’en. Idear?
Akkurat den varianten har jeg ikke hørt om før, men kanskje andre her kan hjelpe?
Har hatt lignende symptomer som også dukket opp når jeg prøvde å reversere en gyro. Sjekk om potmeterene er snudd.
Og sjekk hva som skjer om alle potmetrene står på 50%.
Har nå lest igjennom alle deler med kommentarer og filmer(tok vel et par timer):)
Men er blitt litt usikker og forvirret på hvilket kort jeg burde velge når jeg skal sette i gang med mitt eget prosjekt. Ser at en del har problemer med sine KK kort. Burde jeg putte inn de 1000,- som trengs for et bedre kort, eller bestille 2 kk kort å satse på at det fungerer? Evt et kort i mellomprisklassen som fungerer bra og er stabilt…..
Syntes fremdeles KK er ypperlig til å starte med. Problemene beskrevet her bærer nok preg av at det stort sett er de med problemer som kommenterer for å få løst dem og ikke så mange av dem som fikk ting til å fungere med en gang som kommenterer…
Og nå er KK V2.1 nede i $15,- hos HK.
Vi i redaksjonen har i ettertid testet OpenPilot CopterControl og Dji Naza. CopterControl er nesten umulig å få tak i. Skal du dra på skikkelig å kjøpe noe mer avansert enn KK kan vi anbefale Dji Naza, men da er du oppe i $240,- bare for kontrollerkortet.
Men Naza har brukervennlig konfigureringsprogramvare, aksellerometer og barometer med en strålende høydelås.
Hei,
Har kjøpt meg eit MWC Multiwii SE standard kort frå Goodluckbuy. goodluckbuy.com/mwc-multiwii-se-standard-edition-4-axis-flight-control-board-quadx-w-ftdi-basic-brea…
Er det nokon som har erfaring med dette? Har forresten lest ein del advarslar om Goodluckbuy. Syntes det eg fekk var svært dårleg emballert men det kom i alle fal fram.
Hei! Lurte berre på om det quadcopteret du lagar her hadde klart å fly med ein GoPro på toppen. Og vist ikkje er det nokken modifikasjoner som kunne gjort det muligt?
Quadcopteret beskrevet her løfter en GoPro uten problemer.
Når du sier «GoPro» – snakker du om HD Hero2 eller HD Hero ? Hvilken utgave ?
Så vidt jeg kan se er førstnevnte mye bedre (og litt dyrere) men mangler visst vanlig videoutgang. Funker det da med «vanlige» FPV-sendere ?
GoPro v1 og v2 er like i vekt og størrelse. En GoPro er en GoPro uansett om det er v1 eller v2 🙂
Gopro2 har samme pris fra produsenten som da Gopro 1 kom, $299,- Nå har v1 droppet til $199,-
Det stemmer at Gopro 2 IKKE har SD PAL utgang lenger slik at den ikke leverer et videosignal. Kun komponent HD og HDMI utgang på v2. Jeg har både v1 og v2 av Gopro.
Jeg har også prøvd å fly med Gopro som eneste FPV kam som leverer til videosenderen og ble skuffet. For det første så er Gopro et progresssivt kamera og da jeg kikket i videobrillene så ble jeg fort «tullerusk» i hodet pga strobe-effekten det progressivesignalet gir på interlaced-briller. Hadde brillene også vært i progressivt (noe det ikke finnes), så hadde det vært glimrende.
Anbefaler å kjøpe et lite «board-kamera» som er i interlaced og alt fra 420 til 520 linjer som du setter ved siden av Goproen og feeder videosenderen.
Må korrigere meg selv og krype til korset; GoPro 2 HAR PAL/SD utgang. så det funker. Sorry!
Nå har jeg ikke fulgt veldig med i kommentartrådene til disse artiklene, så med fare for at denne har blitt lenket til før:
A Swarm of Nano Quadrotors
Kanskje noe å prøve seg på når man har lyst til å heve vanskelighetsgraden et par hakk? 😉
Nå er denne svermen av Quadder styrt av en datamaskin OG x-antall kameraer som til enhver tid leser av Quaddenes posisjon… Ikke noe man gjør manuelt for å si det slik…
Hei!
Da har jeg satt sammen ramma til quad’en. Ble riktig så fin. Men er kanskje litt tung. Rett over en halvkilo uten noe tekniske ting montert på. Bare trelistene, kryssfineren og salatboksen. Håper det ikke blir for tungt.
Nå skal jeg bestille alt det tekniske jeg trenger. Jeg har over hodet ingen peilig på hva alle spesifikasjonene på de forskjellige delene betyr. Er derfor egentlig helt prisgitt de linkene som er oppgitt her i artikkelen.
Jeg kommer til å bestille HexTronic DT750 motorer. Ser de er anbefalt i tillegg til at de er på lager i nettbutikken.
Kan jeg bestille de propellene som det er linket til? Bare at de må bores opp. Må jeg ha propsaveerne? Hva slags låsemutter må jeg ha?
ESC’ene som det linkes til er utsolgt. Finnes det noen alternativer som ikke koster skjorta?
Jeg har bygget ramma for å fly i X modus så jeg regner med jeg satser på KK Plus V5.5e Multicopter controller som hovedkontrollkort.
Men kjenner jeg meg selv rett så kommer jeg til å bli bitt av basillen og vil ha noe mer etterhvert. Jeg har lest litt om altitude kontroll og lett gpsflying. Tenker ikke på avansert gpsflyging, men bare muligheten for å legge inn et par punkter som quaden kan fly i mellom. Finnes det noen kort som ikke koster 60000kr? Har sett på noe som heter ArduPilot. Noen erfaring?
Så var det radioen. Jeg har en radio fra et billig helikopter. En 35 Mhz fm radio med i alle fall 4 kanaler. Mottakeren ser ut til å ha 5 eller 6 kanaler. Er det mulig å bruke den i første omgang eller er den helt ubrukelig?
Det var vel det i første omgang:)
Hei Stian! Velkommen etter til basillen og mange timer i «nerde-boksen» 😉
Først av alt syns jeg Quad-ramma di er i overkant tung uten elektronikken. Hva slags dimensjoner, lengde og tykkelse har du brukt. Min Quads vekt var på knappe 300 gram FØR jeg satte på elektronikken…
Motorer og propeller:
DT750 motorene er kvasse, jeg har de selv, og jeg bruker 11×4.7 (11 tommer i lengde og 4.7 i pitch kurve) og det drar skjorta av meg 😉 Propellene jeg bruker hadde jeg fra en tidliger førstekjøps-Quad og de er 4mm MED gjenger som passer perfekt til 750 motorene som har 5mm skaft med gjenger. Jeg kuttet bare av skaftet til ca 1 cm over propellen og skrudde på en normal låsemutter fra Jernia. Presto! Topp notch! Propellene jeg kjøpte er litt dyrere enn de du kan kjøpe på Hobbyking, men de er stivere og dermed flekser de ikke og dermed går ikke så mye kraft/power til spille. (Jeg har ikke funnet de propellene som jeg har, men skal linke til de så snart jeg finner de)
Skal du borre opp propellene så stiller det krav til at du gjør det i perfekt 90 grader, hvis ikke vil propellen snurre skeivt og ikke gjøre jobben sin fodt nok. Propsavere er nødvendig.
ESC-er:
Alle ESC-er, enten 18 eller 25 amps går fint. De som er utsolgt har bare en god historikk på å være gode, enkle å programmere og lave i vekt, men ta deg et søk på f.eks HK og finn noen i samme amps. og les under hvert objekt tilbakemeldinger som folkk har skrevet inn om. Smallsize har disse også: shop.smallsize.no/product_info.php?cPath=15_32&products_id=8569&osCsid=a6ed6da3ad9ca6c26a9…
Kontrollerkort:
Ikke tenk på så mye tillegsutstyr slik som GPS, OSD, altitude kontroll, FPV FØR DU HAR LÆRT DEG Å FLY!!!
Må sies i STORE bokstaver fordi det er slik du lærer deg farkosten og vet hvordan den ligger i lufta. Jeg har drevet/driver med FPV, men syns det er mest moro å fly uten og heller se flyet/helikopteret i lufta fra bakken.
Videregående kontrollerkort:
Eirik har skrevet om bl.a Opencopter, DJI, NAZA og andre kontrollerkort som har disse egenskapene du spør etter. Men kjøp, bygg og fly det du har satt i gang nå og når du mestrer Quad-en så kan du se etter andre kort…
Way-point:
Å legge inn punkter som farkosten skal fly etter gjør at du beveger deg inn i et UAV/UAS område som jeg sterkt fraråder deg til å begynne med som nybegynner. Mange lover og regler om dette, noe du kan lese i de oppfølgende artiklene. Veldig kult å se på men det er jo ikke du som flyr, hele RC-feelingen syns jeg blir borte.
Fjernstyrt fornøyelse eller ulovlig spionasje?:
nrkbeta.no/2012/02/07/fjernstyrt-fornoyelse-eller-ulovlig-spionasje/
Radio:
En 35MHz radio har sine begrensninger bl.a sårbar for interferens (fra andre som bruker den kanalen/krystallen du har) og at du mest sannsynlig ikke har en computerradio (med LCD-skjerm) med utvidete menyer. Du kan fly med det, men dårlig til å fintune, noe du virkelig trenger med Multirotorer.
Gjerne fortell hva slags merke og typebetegnelse på din RC-sender OG mottaker.
Tenker du å kjøpe brukt så sjekk på Finn.no eller rcmarked.no (under elektronikk/data og radioutstyr) og se etter en billig 2.4GHz radio. Spektrum og Hitec f.eks. (Ser det er en som selger DX7 til kr. 1000,- på Rcmarked. Godt tilbud)
Går du for nytt utstyr, så må du nok inn på de store kjedene. Da kjøper/investerer du fremover for et utbyggbart system som du har i mange år. Spektrum er en gjenganger hos de fleste. Jeg startet med en 6-kanalers Spektrum Dx6i. God startradio. Godt menysystem. Gode mottakere.
RC-mottakere:
Rc-sender og mottaker hører jo sammen, så gå for et system som lar deg kjøpe mottakere til en god pris og som er driftsikre/originale. Ingen er tjent med at du har kjøpt en pirat-/billig mottaker som kutter forbindelsen i det du flyr et stykke unna og f.eks deiser nedi noe levende… :-/
Petter
—
Skrev feil om at DT750 motorene har 5mm skaft, de skal jo selvfølgelig være i 4mm 🙂 for at de skal passe perfekt til 4mm propellene.
Hei igjen.
Ja, jeg syntes kanskje ramma ble litt i overkant tung. Har brukt 15 x 15 mm list. Hadde i grunnen tenkt å bruke mindre dimensjon, men det var det de hadde når jeg var for å kjøpe. Diameteren er 80 cm. Bygd for utvidelse:) hehe. Salatboksen er 12×18 cm så kryssfinèrplata i midten ble også 12×18. Mulig jeg må trimme litt her og der. Kommer jeg til å klare å fly med ramma som den er nå? eller må jeg bort med litt vekt med de motorene jeg har valgt?
Radioen fulgte med et helikopter til 1200 kr så kvaliteten er så som så. Planen er kjøpe en radio etter hvert, men lurer bare på om jeg klarer å få quaden i lufta sånn midlertidig med radioen og mottakeren jeg har.
Her er bilder av ramma og radioen.
[link picasaweb.google.com/107893011808492877599/Quad?authuser=0&authkey=Gv1sRgCMT_6M34nNPCdg&fe…
]Bilder av ramme og radio[/link]
Sitat: «(Jeg har ikke funnet de propellene som jeg har, men skal linke til de så snart jeg finner de)»
Hei Petter.
Nå har jeg alt og ramma er ferdig bygget. Men jeg gikk på en bom når det kom til propeller. Sylinderen som skaftet skal gjennom er 10mm dypt men må fóres ut med ringer i 4mm dimensjon. Problemet oppstår fordi disse fóringene kun er 2,5mm dype og dermed etterlater et 7,5mm «tomrom» Det er umulig å få disse til å sitte rett med utgangspunkt i 2,5mm.
Så det ville vært en drøm om du fant linken til disse propellene.
Hehe! Ikke rart Quad-en din er tung. 80 cm og med slike lister, senterplate og ikke minst «salatboks» 🙂 Får litt minner tilbake til Tamiyas kjente «Vanessas Lunch Box» fra 80-tallet:
clodzone.com/wp-content/uploads/2011/06/tamiya_lunchbox_build_36.jpg
Min «lønsjboks-Quad» kan du se her (versjon 3 og bare noen få detaljer igjen):
Bilde 1 – Quad:
visedeg.no/images/jp6jnscfs7y5b89ezoyq.jpg
Bilde 2 – Quad:
visedeg.no/images/soikaricx51tm1n7zis3.jpg
Med de samme motorene om jeg har så kommer du deg opp. Nok kraft med rette propeller der. Samme motorene jeg har.
Radiosender og mottaker er jeg derimot litt usikker på. Ser det er en Art-tech mottaker men du får nesten bare prøve. Kanskje du har noen du kjenner som du kan låne et komplett RC-sender/mottaker sett fra?
Bare husk at du kanskje må reversere noen kanaler på senderen for å få den til å fly rett vei…
Petter
—
Hehe, jeg er på min første versjon jeg da:) Det blir nok litt modifiseringer etterhvert. Når alle delene er på plass så vet jeg hvor mye plass jeg må ha. Ser jo at jeg i alle fall får plass til 3-4 kontrollkort i boksen min når jeg ser størrelsen på boksen din. heheh.
Ja, jeg skal prøve radioen og se. Kommer til åkjøpe en skikkelig en etterhvert. Får bare håpe jeg ikke kræsjerskikkelig først:)
Du får si fra hvordan prosjektet ditt skrider frem 🙂
Må sies at min versjon 3 har nå, i diagonal retning -motorskaft-til-motorskaft, 55cm i lengde… Syns min er stor nok 🙂
Hei Stian! 30 amps er mer enn nok og disse er sikkert bra. Det er bare å prøve…
Hva med denne ESC’en? Som sagt så har jeg ingen peiling på dette. Men ser ut som om den har de samme egenskapene som den som er linka til i artikkelen….
hobbyking.com/hobbyking/store/__13429__HobbyKing_30A_BlueSeries_Brushless_Speed_Controller.html
Den er helt sikkert bra, men du trenger ikke 30 Amps. 20 er vel nok?
Noen andre som har Dji Naza kontrollkort?
Ser ikke ut som jeg får noen kontakt når jeg kobler det til PCen.
Blinker bare «MC Output on» i rødt heletiden uansett hva jeg gjør. Tips?
Både Marius og meg har Dji Naza og har ikke opplevd det problemet. Jeg ville tatt en runde og søkt litt i denne tråden: rcgroups.com/forums/showthread.php?t=1536553
Takk for tipset.
Skal spørre litt i den tråden 🙂
Har forresten også kjøpt inn Spektrum DX8 som jeg liker veldig godt. Nå har jeg riktignok ikke flydd noe med den enda, men den føles veldig solid og enkel.
Heh. Var USB Driveren jeg manglet.. Var skråsikker på at alt fulgte med i den ene setupen, men neida. Så nå virker alt ser det ut til. Får teste Quaden i dagslyset imorgen.. endelig >:]
Da har jeg endelig fått Quaden opp i luften.
Det er akkurat som Eirik Solheim sier ang. Dji Naza. Akkurat som den svever på ei luftpute. Utrolig moro når den kan være såpass stabil.
DJI NAZA spørsmål.
Jeg har nå byttet ut KK-kortet med en DJI NAZA kontroller, får kontakt med PC og kalibrert stikker osv, men når jeg kobler fra pc og skal starte opp er det ingen reaksjon i motorene. Har prøvd å armere slik som det står, lyset blinker som det skal, men fortsatt ingen reaksjon. Noen tips? Skal rød ledning i kabel til ESC’ene være kuttet?(står det i manualen til NAZA.
Øyvind
Tenkte jeg skulle oppdatere min egen kommentar litt.
Fant etter litt leting på nettet, at ESC’ene ikke var direkte kompatible med NAZA uten å flashes,men at du ved å starte NAZA før ESC fikk power skulle virke, og det gjorde det. Første flytur med NAZA i går og den er helt super.
Øyvind
Flott at du fant en løsning. Om det er slik at problemet løser seg helt dersom du flasher ESCene med SimonK-firmware så kan jeg anbefale det på det varmeste. Har nettop testet med noen billige HobbyKong-ESCer som jeg flashet med SimonK. VELDIG stor forskjell. Quad’en går stillere, jevnere og mye mer stabilt. Jeg brukte da HobbyKing F30A, som er relativt enkle å flashe med en USBASP.
hei! jeg har nettopp bygget quadcopteret ferdig men når jeg skal lade batteriet så vill det ikke lade helt fullt noen som vet hvorfor?
det er samme lader som i beskrivelsen av hvordan man bygger quadcopteret
Noen som har en brukbar radio og mottaker til en rimelig penge eller? 🙂
Nå er alt montert, ESC’ene kalibrert og gyroer reversert. Men quaden er fortsatt ustabil. Samme hvor mye jeg justerer på radioen så roterer quaden svakt til venstre, for så å fly til en tilfeldig side. Den går litt rett opp i starten når jeg drar på med throttle, men det er ikke sjangs for at den står og svever på stedet hvil. Begynner å bli små frustrert.
Er KK kortet avhengig av at quaden er veldig balansert? Vi har lagd den så symmetrisk som mulig, men ikke perfekt balansert. Den veier 1.2 kg med alt, er dette for tungt?
Også prøvd å justere pot’ene fra 50% til nesten 100% uten at jeg merker noe endring. Når de snakker om å justere gainen, mener de da at man skal endre på alle pot’ene sammen?
Vi bruker de anbefalte ESC’ene + de alternative sterkere motorene + KK V2.
Takker for hjelp!
Min opplevelse av KK er at det ikke er så kresent på nøyaktighet. Har fått kortet til å fungere på mange rare konfigurasjoner med langt fra optimale løsninger hva både propeller, motorfester og symmetri angår.
Men: KK er et enkelt kort uten aksellerometer. Så det er lite sansynlig at du klarer å få farkosten til å henge rolig på samme sted uten at du hele tiden justerer litt. Skal du ha «hands free hover» med KK må du isåfall ha temmelig perfekte forhold. Både en perfekt rigg og helt vindstille.
KK stabiliserer godt, men du må fly selv. Mao. hele tiden holde i spakene og justere for å holde farkosten i ro i luften.
Vridning mot venstre: dette kan skyldes unøyaktigheter. Sjekk spesielt motorfestene. Alle motorene bør stå slik at de peker rett opp. Om en av motorene er vridd kan dette føre til at quad’en hele tiden vil dra seg rundt i en retning.
1.2 kilo med alt ombord skal ikke være for tungt for de motorene og propellene vi har anbefalt.
Vi har basert artikkelen på det du trenger for å komme igang og få farkosten til å fly helt greit. Om du vil gå et lite hakk videre vil jeg anbefale at du balanserer propellene. Svært ubalanserte propeller kan også føre til en litt ustabil rigg. Propellene vi har anbefalt er ikke så ille og jeg har fått ting til å fly helt fint uten å balansere dem, men ting vibrerer mindre og blir lettere å fly om propellene er balansert. Vi bruker denne:shop.smallsize.no/product_info.php?products_id=2658&osCsid=0cf3f1899253d31b4152d85a43c93074
Hei
Endelig fått alle delene til min quadkopter, og bygget den i henhold til instruksjon. Jeg har ikke flashet kortet (orginal SW). Jeg antar at den leveres som + konfigurasjon. Jeg har satt motor retning 1 og 4 med klokken. og 2 og 3 mot klokken. Jeg har fått alle motorene til å starte opp samtidig. Når jeg skal forsøke å få den i luften, så vipper den over (motor 4 løfter slik at motor 1 går i bakken. Jeg har ikke flashet kortet (orginal SW).
Jeg antar at kanskje så må en gyro reverseres, men vet ikke hvilken. Forslag?
Dette høres kjent ut. Jeg la ut en video vimeo.com/37461773 lenger opp som viste mitt problem. Jeg antar ditt er noe lignende.
Tidligere i uka fikk jeg «programeringsdingsen» for å flashe kortet, og skal prøve å få gjort dette i løpet i helgen.
Fint, gi tilbakemelding hvordan det gikk.
Tja. Så ut som flashingen gikk bra(valgte 4.7 X). Satte kortet tilbake, men nå i X, og festet alle koblingene så det skulle passe den nye konfigurasjonen. Når jeg nå prøver vipper den mot høyre!
Men, når jeg sjekker om de riktige motorene svarer på utslagene blir jeg litt usikker. Når jeg gir utslag med rudder virker det som om motorene tvers overfor hverandre øker turtall, som de skal. Når jeg prøver aileron er jeg litt usikker om begge motorene på høyre hhv. venstre side øker i turtall, eller om det kun er de bakre motorene som svarer på mitt utslag. Det samme gjelder når jeg gjør utslag med elevator. Det virker som om kun bakre venstre øker når jeg tar spaken frem og venstre foran når jeg drar den bakover.
Jeg prøvde også å holde quaden i lufta og vippe den forover og sidelengs og det virket som om den ikke prøvde å kompensere utslagene, men derimot forsterket utslagene. Kan det være at gyroene må reverseres?
Jeg prøvde dette, med roll pot til min, men LED’en flasher ikke 10 ganger. ESC’ene spiller som normalt(og LED flasher 3 ganger) og deretter kommer det jevnt med pipelyder. Jeg prøvde begge sider på roll pot i tilfelle det skulle være reversert, men ingenting ser ut til å hjelpe…
Hmm, ser nå at både rcexplorer.se/Educational/kkguide/kkguide/quadx.html og kkmulticopter.kr/index.html?modea=manual som jeg brukte, er satt opp med motor 1 venstre foran, deretter 2, 3 og 4 CW, mens her, på denne siden er det 1, 3, 4, 2. Ser ut til at det blir mer prøving i morra.
Hei,
Jeg startet direkte med kontroller i X-config (KK-kort fra MultiRCshop.com). Med hjelp av displayet som jeg hadde bestilt med kortet(kan sterkt anbefales) så fant jeg ut at:
M1 Front Left CW
M2 Front Right CCW
M3 Back Right CW
M4 Back Left CCW
Når jeg hadde koblet om motorene, så funerte alt helt fint, men selvfølgelig noen krasjer og jeg har nå bygd opp ramme nr. 4 med karbon rør. fungerer helt fint.
Lykke til.
Øyvind
Hei.
Jeg har Hobby King kortet som tydeligvis har en annen rekkefølge på motorene enn det fra MultiRCshop.com. Men, hvilken «Flash Firmware Option» bestilte du i fra MultiRCshop.com?
Hei
Jeg prøvde først med 4.7, men i og med at det ikke gikk, så bestilte jeg ett nytt KKkort med v5.5e. bestilte samtidig display for å koble til, og når jeg gikk igjennom menyene der, for oppsett oppdaget jeg at det var dette motoroppsettet som skulle brukes, og ikke det som jeg tidligere fikk angitt lengre oppe i artikkelen.
Lykke til, kjempe gøy når det endelig flyr.
Øyvind
For å gå tilbake til det jeg skrev i det første innlegget her. Det står alle steder(og jeg ser det også på diverse videoer) at LED flasher 10 raske ganger ved gyro reversering. Når jeg skrur roll pot til 0 blinker LED 3 ganger og det kommer pipelyder omtrent hvert sekund. Beveger jeg en av spakene lyser selvfølgelig heller ikke LED for å vise at gyro er reversert.
Vurderer sterkt å kjøpe KK-kort fra MultiRCshop.com nå for å teste/sammenligne.
Jeg har jobbet med å få quadkopteret mitt i lufta i dag, og jeg hadde også litt problemer med å få reversert en gyro. I 4.7 skal det visst bare blinke tre ganger når man skal reversere gyroer, slik det står her. Jeg fikk det altså til til slutt. LED blinket tre ganger før de plagsomme pipelydene du nevnte overtok. Da rørte jeg aileron-spaken og LED begynte umiddelbart å blinke slik det står at den skal, og roll-gyroen min er nå reversert.
Det er sikkert lurt å oppdatere artikkelen, slik at de som oppdaterer til 4.7 blir gjort oppmerksomme på at LED bare vil blinke tre ganger.
Så bra. Da er det altså riktig at LED blinker 3 ganger. Men når jeg beveger en spak til sidene for å reversere, så blinker/lyser ikke LED for å bekrefte at gyro er reversert…
Takk for en kjempegod guide! Jeg har akkurat fått quadkoptret mitt i luften og det flyr bedre en forventet.
Denne videoen kom også til god hjelp under byggingen for de som bruker KK-kortet.
youtube.com/watch?v=B6m49Cw3OFU&feature=related
Takk for link til informativ video. Har oppdatert artikkelen med link til den.
Også hyggelig at noen av alle dem som har fått helikopteret sitt til å fly fint også kommenterer. Forumtråder og kommentarfelt blir ofte dominert av dem som ikke får ting til å virke. Det er vel og bra, og dette er et fint sted å få hjelp. Men det motiverer å se at folk får ting til å fly fint også!
Her er også en bra videoserie – til og med med loddekurs:-)
hoverflytech.com/video-tutorials.html
Etter å ha ventet i uendeligheter fikk jeg endelig siste brikke i puslespillet. Første flytur gikk over all forventning, noen mindre justeringer (roll og pitch) måtte på plass, men da lå quadkopteret fint i luften.
Veldig bra byggeguide! Jeg har stort sett holdt meg til den, med mindre justeringer.
Har benyttet KK kortet v 2.1 og DT750 motorene. Loddekurset nevnt ovenfor kan anbefales for de som ikke har erfaring med lodding, ekstremt viktig med nok varme slik at en unngår kaldlodding. Anbefaler Dremels gassdrevne loddebolt, ingen ledning og varme i massevis.
Godt å høre en gladhistorie 🙂
Jeg har nå det meste på plass med unntak av propellene som jeg ikke er noe fornøyd med. Jeg har samme motorer som deg. Kjøpte du propellene som ble anbefalt eller har du gått for noe annet? Har du link?
Jeg kjøpte de som var anbefalt, de kom kjappest av alt, med budbil levert på jobb… De har fungert fint så langt.
Må i samme slengen understreke viktigheten med å stramme- og bruke loctite på skruene i motorfestet. Jeg var nok gjerrig med loctiten og mistet en motor ca 4 m over bakken. Konstruksjonen tålte det heldigvis, da kom nytten med strips og bullet connectors (i stede for sukkerbiter), ting faller av, men kan lett settes sammen igjen i felt.
Hvor mye koster et kamera?
Jeg regner med at du mener det lille 808-kameraet? Det koster rundt 40 USD (uten minnekort). Jeg bestilte et par «808 #11» av ebayselgeren eletoponline365 i fjor. Nå har det også kommet en ny utgave som heter #16. Den har en rekke forbedringer fra #11. Hvis du skal kjøpe et 808-kamera vil jeg derfor anbefale at du går for #16-utgaven.
Eirik Solheim, denne artikkelen har kostet meg dyrt! 😛
Startet med selvbygd Quad med KK, + Tunergy 9X radio, så oppgraderte jeg til DJI Naza kontrollkort og Spektrum DX8 radio, og nå er det Hexa med DJI F550 ramme (6 motorer) + understell + GoPro kamerafeste fra Quadframe.com ..
Tenker det blir et lite fly som jeg kan bruke som FPV også etterhvert 🙂
Moro er det iallefall!
Hehe. Bitt av basillen der altså. Det er jo bare hyggelig det!
Nå holder jeg på med en Octo.. Beløpet nærmer seg fortere 100.000kr enn hva jeg hadde trodd..
DJI S1000 + A2 – ca 30.000.-
DJI Z15 GH4 Gimbal – ca 20.000.-
Panasonic Lumix GH4 – ca 22000.- (inkl objektiv)
DJI Lightbridge (HD Videooverføring) ca 10500,-
DJI OSD Mark 2 ca 2000,-
DJI Videlink (for FPV kamera) ca 1600,-
Spektrum DX18 QQ(radio) ca 8900,-
Batteri (16000mAh) ca 2000,-
Lader + Strømforsyning ca 3500,-
..Skriver du ut en sjekk? :p
Hei,
dette må bare prøves ut. noen som har en ramme å anbefale til en nybegynner som et alternativ til furulista?
rctimer.com/index.php?gOo=goods_details.dwt&goodsid=643&productname=
Den kanskje? Ellers så er det muligens noen greie på hobbyking.com også 🙂
Har ikke testet denne selv, men har lagt merke til den og liker at den er sammenleggbar samt at det ser ut som den beskytter motorene fint. Og det er bra for nybegynnere… 🙂
goodluckbuy.com/folding-abs-450mm-shaft-distance-quadcpoter.html
Takk Merko og Eirik 🙂
RM450 V2 virka ut som en lett, billig og enkel ramme for en nybegynner. Blir spennende å sette igang med bygginga!
Her ser du et greit klipp av hvordan du moterer den (+ et par gode tips)
vimeo.com/39061641
Det er riktignok for et Hexa helikopter (6 motorer), men rammen er mer eller mindre identisk (Bare at den har 2 ekstra armer)
RM450 er forøvrig en «kopi» av «DJI F450», men mye billigere.
Takk nok en gang Merko 🙂
Hvordan klarte du å skaffe deg Tunergy 9X radio ? Har prøvd nå i en uke men hver gang hobbyking får den inn rekker jeg ikke å lese mailen engang før de er utsolgt igjen.
Første gangen så kjøpte jeg feil Tunergy. Kjøpte altså Mode 1, mens det er Mode 2 som blir brukt mest i europa. Ingen stor forskjell, er kunn hva man er vandt med fra før. Man kan bygge om en Tunergy Mode 1 til Mode 2 og omvendt om man har litt kunnskaper.
Men etter et par uker jeg kom inn i denne hobbyen, så kjøpte jeg meg en Spektrum DX 8 fra smallsize. Den koster 3600,- +-, så billig er det ikke..
Tunergy er nok det beste man finner til den prisen.
Tunergy blir utsolgt med en gang. Eneste muligheten er om du legger inn ordre på den selvom den står som «backorder».
Hei Scott.
Jeg bestilte Tunergy 9X radio for ca 4 uker siden. Greia er at du må bestille selv om den er på backorder. Da blir du lagt i køen og får en radio med en gang de får inn. Jeg venta vel en uke før jeg fikk en mail om at de hadde fått et nytt parti. Og ca 3 uker i posten så var den her.
For å få bestilt når den er på backorder så må du skru av javascript i nettleseren før du trykker på bestill-knappen. Da funker det. Ikke spør meg om hvorfor. Jeg har ikke peiling på data. Jeg leste det bare i en av kommentarene under radioen. Funka som bare det.
Hei Merko og Stian.
jeg bøyer meg i støvet, stor takk til dere begge!
Ha ha, fantastisk. Etter mange forsinkelser fikk jeg endelig satt på propeller og bygget ferdig min quad i dag. Det meste gikk på skinner og oppsettet gikk greit så lenge jeg fulgte oppskriften til punkt og prikke. Jeg måtte selvfølgelig lage den litt penere enn å bruke furulister. Så jeg gikk for Biltemas tørkestativstang til 109,- (ESCene passer perfekt inni hulrommet)
Etter noen forsiktige løft og delvis kontrollerte løft så gikk den jo self litt hardt i bakken i ny og ne. Ramma tok litt skade og jeg skjønte fort at den ikke ville vare lenge. Så i en slags ukontrollert ekstase (over hvor morro det var) så kjørte jeg på full trottle og ble nesten sjokkert over hvor høyt den gikk på så kort tid (og over hvor fort den falt igjen 🙂 Flyhavarikommisjonen vil neppe klare å gjenskape hva som skjedde men konklusjonen vil klart være inkompetanse. Jeg fant propelldeler i en omkrets av 30 meter. Alt utenom ramme og propell overlevde et fall på over 20 meter.
Dette var utrolig gøy men jeg støtter artikkelen som anbefaler å begynne med trelist 🙂
Herlig. Du er ikke alene. Jeg husker at da jeg startet var det ikke en eneste tur ut som endte med at batteriet var tomt. De endte alltid med knust quad lenge før det…
Men med furulistene har rammen tålt fall fra 20 meter også. Så det gikk stort sett bare hardt utover propellene og stripsene som holdt motorene.
Nylig var en kollega ute for å få sin nybygde quad trimmet og testet av oss som har syslet med dette en stundt. Det begynte med at jeg fløy den fint og kunne konkludere med at den var helt supert bygget. Før jeg gjorde en feilmanøver og vips så fløy det propeller i alle retninger da den traff bakken.
Min kollega fikk satt den sammen igjen på stedet og fikk på nye propeller. Da var det bare å gi ham fjernkontrollen og se ham ta sin første tur. Siden vi filmet har vi dette helt nøyaktig: turen varte 24 sekunder. Var vel 10-20 meter oppe i luften før det gikk galt og furuen ble plantet i bakken. Igjen var det bare strips og propeller som røk…
Så anbefaling: begynn i det små. Få den 2-3 meter opp og øv på å sette den rolig ned med en gang. Så kan du øve på å holde den i luften en stund osv…
For alu-armer anbefales det å forsterke med trepropper i enden der du setter skruer gjennom. Jeg bygget en aluramme selv for en stund siden. Da den knakk en arm ved festet i første krasj skjønte jeg hvor genial fururammen er…
Er det noe som tilsier at ESCene ikke kan ligge nærmere sentrum? (med unntak av ledningslengden selvfølgelig) Er det noe konflikt av «intergalaktisk støy» mellom ESC og KK kortet hvis de ligger for nærme?
Jeg ser at folk stort sett anbefaler å sette ESCene ute på armene av to hovedgrunner: bedre kjøling og mindre elektrisk støy.
Men: på den quad’en jeg bruker mest for tiden har jeg alle ESCene stappet inn rett under kontrollerkort og radiomottaker. Kan ikke si at jeg merker noe problem med det.
Sånn da var versjon 2 bygget med bruk av furulist. For å bygge opp under solskinnshistoriene så gikk oppsettet denne gangen også veldig fint ved å følge oppskriften.
Av erfaring tok jeg det nå veldig med ro for å kalibrere fjernkontrollen. Løftet forsiktig 10 cm før jeg slapp den ned med en gang. Da så jeg hvordan den oppførte seg og kompenserte deretter med trimming. Dette holdt jeg tålmodig på med inntil batteriet var tomt.
Det jeg tenkte inne i hodet mitt mens jeg holdt på var «Vil jeg noen gang kunne ha kontroll på denne her? Det virker rimelig vanskelig» Er det andre her som har kjent på det samme i starten og nå i dag bare ler med tanke på hvor god kontroll dere har over fartøyet deres 🙂
Hehe, fikk aldri til KK kortet når jeg prøvde, så gikk rett til innkjøp på Naza Kontrolleren. Der flyr den iallefall veldig stabil.. Men enig at det helt sikkert krever mange timer med flyging før man har sikkelig kontroll.. Holde meg ro i luften er min beste egenskap for øyblikket..
«Jeg kommer ALDRI til å få kontroll over denne…» Joda, kjenner igjen den tanken. Har sett på videoer av folk som flyr på YouTube og slått fast at det der…. det er jo helt umulig. Og så løsner det på et eller annet tidspunkt slik at du kan begynne å fly med stadig bedre presisjon. Nå flyr jeg i sirkler og 8-tall. Men mitt første forsøk på en 360-graders flip endte med 180 grader og quad plantet veldig hardt i bakken…
Men: propellbudsjettet går kraftig ned og jeg kommer oftere og oftere hjem med tomme batteri i stedet for å komme hjem med knust quad og fulle batteri.
Sleit med kontroll i starten ja, men jeg begynner å få bedre kontroll. Det er ikke bare lett, men nå klarer jeg i det minste å bruke opp 2 – 3 batterier. Sliter med å snu doningen og fly mot meg, da går det som regel hardt i bakken, derfor blir det mye bakking. Kan fly i sirkel om jeg roterer kopteret rundt meg mens jeg snur meg etter. Er nå klar med versjon 4 i X modus (KK kort), blir spennende å teste det. Har handlet inn godt med furulister, men vurderer andre alternativer, eventuelt en patent hvor det er lett å skifte en brukket arm.
Når jeg handla på hobbyking fikk jeg et batteri på kjøpet. er et 30c 2450 mAh batteri med 22,2 v. 6 cells. Er det overkill så det vil ødelegge noe? veier nesten en halvkilo da. Så noen hadde spurt om lading og fant disse batteritipsene.
Charge Rate: LiPo’s should be charged at 1C or less. This means if you have a 3s 3300mah pack you can charge it at 3.3A. If your charger is not capable of this current, then just chose the closet value to it, for example the Apache 2500 has a maximum charge rate of 2.5A so you would select that. The only disadvantage of a lower charge rate is that it will take longer.
Med andre ord 2.8A på det anbefalte batteriet.
Nå har jeg lite peiling på batterier, men vil tro at 6cells batteri blir for mye.
Jeg vet iallefall at 3-4 celler batteri er anbefalt for DJI Naza/DJI ESC´ene.
Selv har jeg et 30c 5000 mAh 4cell batteri som veier nesten 1kg.
http://www.fpv.no og http://www.modelflynytt.no er 2 greie forums innen dette 🙂
Systemet er bygget for 3-cellers batterier. Det vil si 11,1 volt. Om du setter på 22 volt vil du sansynligvis får et flott, men kortvarig fyrverkeri før du så må sette deg ned og bestille nye ESCer og nye motorer…
Så: 6 celler på denne riggen er IKKE lurt!
Da sparer jeg det batteriet til nyttårsaften. 🙂
Etter en del turer med quadqoptret har det stort sett gått feilfritt med ingen skader. Men så en dag, helt plutselig ryker den ene strikken på propsaveren og quadcoptret gikk rett i bakken. Anbefaler alle som bruker propsavers å følge nøye med å se etter skader på strikkene før hver flytur. Heldigvis tok kun strips og et par propeller skade.
Fanget hele turen med GoPro kamera:
youtube.com/watch?v=7f6BxHjy9wg
Heisann
Noen som kan hjelpe meg …..Har mekka ett quadcopter med KK fra HK. Flasha det til 4.7 X. Motorer sviver rett vei.
Har fått til å synkronisere ESC’ene men har ett «lite» problem!
Holder det i hånden og tester utslag på stikka…
1. Må armere KK korte ved å dra stikka til venstre…(skulle det ikke være til høyre)
2. Når jeg drar elevator opp så speeder Front Right motor opp (#3)
3. Nor jeg drar aileron til høyre så speeder også Front Right motor opp (#3)
4. Når jeg drar aileron til venstre speeder Back Left motor opp (#2)
5. Når jeg drar elevator ned speeder også Back Left motor opp (#2)
Alt er liksom motsatt i tilleg til at motor 1 og 4 ikke ser ut til å gjøre noe fra eller til når jeg beveger på aileron/elevator ….
Bruker en DX6i med reciever fra HK.
Skjønner ikke noe jeg …
Help !
Vet ikke om du har sett denne: kkmulticopter.kr/index.html?modea=manual
Spektrum må reversere alle kanalene unntatt throttle.
Takker! Det funka ja!
Nå står jeg derimot ovenfor ett nytt problem. Prøver å fly med quadden men den roterer bare mot klokka hele tiden.
Har sjekka at propellene sviver rett vei.
Prøver å kompensere med rudder men da ser det ut til at quadden vil vippe over.
What to do ?
(Har KK kort fra HK med 4.7 X og DX6i)
Du må reversere yaw gyroen. Det står hvordan både i linken i mitt forrige svar og i denne artikkelen lenger opp.
Hei, har endelig fått laget ett lite klipp med selvbygd quad fritt etter byggebeskrivelsen her på NRK Beta. Flyr nå med en DJI NAZA som kontroller og med de motorer og ESC’er som først foreslått her.
Filmen ligger ute på Youtube: youtu.be/4i54Vf46i9c
Filmet med ett nøkkelringkamera ombord og ett Canon speilrefleks fra bakken. Junior er kameramann og redigerer. Ganske godt fornøyd selv nå…og det er gøy.
Takk. Det er hyggelig å se at folk begynner å få farkostene sine i luften!
hei,
Så kom den store dagen i forgårs:
vimeo.com/42330725
Dette er aller første oppstart, og før hastighetskontrollene er kalibrert. Propellene synes heller ikke å gå rette veien. Så ennå gjenstår en del ting før jeg tør å slippe den løs fra «testbenken». Heller ikke bikkja var særlig imponert:)
Er det noen som ut fra filsnutten ser at andre ting er rivruskende galt, eller egne erfaringer fra oppstarten, så mottas tips med stor takk.
Hvordan gikk det egentlig med Quad’en din? Har samme problem selv. Ga du opp eller kom farkosten i lufta til slutt? 🙂
Hei Rune,
Veldig lenge nå siden jeg var innom denne NRK quadrocopter byggetråden.
Jeg ga på ingen måte opp, men ble tvert imot fullstendig hekta.
Dvs. jeg ga mer eller mindre opp denne selvbygde med to trepinner. Bygde vel en 10-12 forskjellige, med 3-4 forskjellige kort, prøvde og prøvde, men fikk det aldri skikkelig til. Først da jeg kjøpte kk2 kortet ble det litt fart i sakene, men også det er et tilbakelagt stadie nå.
For bitt av basillen ble jeg og her er det jeg etter hvert endte opp med, en TBS Discovery med Tarot foto gimbal.
vimeo.com/85482929
Det har kostet litt tid og penger, men er vel verdt det:)
Så var tiden inne til å trekke utendørs. Et ørelite byks og optimismen steg. Litt mer gass etter hvert, men det løfter bare på ene siden ser det ut til. Men så plutselig, ut av ingen ting, uten at jeg ga eksta på tror jeg, ble plommetreet neste stopp. Kanskje berørte jeg høyrespaken, jeg vet ikke. Burde så absolutt ha fulgt rådet om å finne en stor åpen plass, men iveren ble for stor. Heldigvis,ingen skader. Får bare teste og trimme videre.
vimeo.com/42462847
Etter å ha ligget i et hjørne av rommet en måned tokk jeg meg endelig tid til å flashe KKkortet med v4.7 + konfigurasjon. For en forskjell!
Quadroen gikk fra så og si umulig å styre til meget stabil. Anbefaler alle å gjøre det samme!
Virkelig en bra artikkel, har inspirert hele 4 quadrocoptere i klassen min(skal sies at det er teknisk kybernetikk ved NTNU, men likevel da).
Knallbra tips. Har mistet litt motet etter mange turer og opplevd den som nærmest umulig å styre. Så dette skal jeg prøve (må bare finne hvilket hjørne av rommet jeg la fra meg qaden:-)
Her er den, rcgroups.com/forums/showpost.php?p=18609175&postcount=73. Om du ikke allerede har en avr ISP programmerer finnes det mange billige alternativer. Lykke til!
Ergelig. Fant endelig frem copteret og flashet til 4,7 og fulgte oppskriften. Men opplever den fortsatt som en villstyring uten styring 🙂
Alt virker riktig, men jeg får den aldri til å løfte seg stabilt opp fra bakken. Så fort den får vinger så oppfører den seg som en overvektig spyflue uten retningssans. Den har ikke nødvendigvis et mønster på hvordan den oppfører seg, men å hoovre vil den absolutt ikke gjøre.
Noen her som bor i Vestfold og vet hvordan man kontrollerer en overstimulert quadkopter loaded med Red Bull?
Ok, var kanskje litt tidlig ute med ergelsene:-)
Viser seg at sist jeg satte den fra meg så gjorde jeg ikke forbredelser til neste tur. Så motorene var rimelig slerkete (og i forventningene om en fantastisk forbedrelse pga flashing så «glemte» jeg å sjekke) og dermed ble hele copteret ustabilt og gyroene sikker overarbeidet.
Vel, fikset nå på det og prøvde igjen. Fantastisk!!! Jeg kan nå hoovre (til en viss grad) og har opplevelsen av å ha (til en viss grad) kontroll. Kjempegøy. Knuste et par propeller men det var det verdt.
Anbefaler å flashe til 4,7. Det blir noe helt annet.
Ikke alle som vil bruke de «standard» delene til å bygge helikopter…
tv2.no/nyheter/utenriks/kunstner-lagde-helikopter-av-sin-doede-katt-3797184.html
(hjelp)
Søren og. Hadde ikk «refreshet» nettleseren og så ikke at du hadde publisert den samme linken 46 minutter før 🙁 Jaja! Uansett, ikke bra!
Kunstner lagde helikopter av sin døde katt:
tv2.no/nyheter/utenriks/kunstner-lagde-helikopter-av-sin-doede-katt-3797184.html
Tja, vil ikke akkurat oppfordre Betas lesere i å gjøre det samme og en smule respektløs overfor «katteskinnet»…
[…] […]
Etter at den første quad’n gjorde mest nytte for seg til å klippe ned greinene på plommetreet, har jeg nå bygget et nytt.
Enda dette har 70 cm armer, mot det første 60 cm, så klarte jeg å bygge det 32 g lettere (det første 1130 g, det andre 1092 g, ferdig rigget med batteriet)
I tillegg virker dette siste mer solid og stabilt. Takket være et råd jeg fulgte her et sted om å kløyve listene og lime og stifte sammen igjen. Så jeg er blitt veldig god på å lage quadskrog.
Det jeg ikke er så god på er få det under kontroll i lufta. Men jeg tror jeg er nesten der.
Problem 1: det har en tendens til å rotere.
Problem 2: drar jeg på forover, øker farten på motor 1.
Så åpenbart må yaw og pich reverseres., men jeg får det ikke til. Enda jeg følger rådet til Eirik.
Roll fungerer, men med noe ulik motorkraft. Jeg tror det her er snakk om justering på selve radiosenderen?
Jeg bruker opprinnelig Kk kort fra Hobbyking, og vil i det lengste forsøke å få det til med det. Men fikk et Kk plus v5.5e fra multishop i posten i går. Noe som tilsier jeg bør ta det i bruk like godt først som sist?
At det går bakover når du gir på gass framover er et tegn på at du må reversere kanalen for pitch på radioen din, ikke reverser gyroen på quadroen. Hadde gyroen vært problemet ville quadroen flippet over med en gang.
Hvor kraftig roterer det? Når min var reversert var det snakk om 360grader/s. I tillegg vil du se at den prøver å rotere fortere og fortere.
Jeg hadde også problemer med svak rotatsjon, se min kommentar over hvordan jeg fikset problemet med flashing av kk-kortet
Noen som har erfaringer med disse propellene?
hobbyking.com/hobbyking/store/__22446__Slow_Fly_Electric_Prop_1045SF_4_pc_.html
Har omsider fått bygget ferdig, og behovet for flere propeller har meldt seg etter noen runder med gresstrimming… Skroget har 15mm armer av kvistfri gran og er limt til kryssfineren med epoxy og kommer nok til å overleve både propeller og motorer.
Har ikke erfaring med de propellene, men har blant annet testet disse:
hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=17961
de er ikke å anbefale, tåler lite og bøyer seg en del. Har mye bedre erfaring med de propellene som ble anbefalt i del 1 av byggeguiden.
Har nå fått propellene i hus, og de kommer med adapter som passer til 3mm aksel. Litt testing tyder på at de gir litt mindre løftekraft enn de som opprinnelig ble anbefalt, men bortsett fra det ser jeg ikke noe negativt. I alle fall flyr farkosten igjen.
Har bygget et tricopter etter Tricopter 2.5 fra rcexplorer.se og har støtt på et problem. Den ene motoren løfter mindre enn de andre og er langt utenfor kalibreringsrekkevidden til radioen. Den gir både for lite «gass» og øker også veldig lite om jeg beveger aileron. Dette gjør at plattformen ikke er mulig fly.
Radioen jeg har er Fly Sky FS-TH9X (kina-kopi av Turnigy 9X 9Ch)
KK: HobbyKing Multi-Rotor Control Board V2.1 (Atmega168PA) flasha med kapteinkuk V1.6
Noen som har en idé om hva som er galt?
Har du kalibrert alle ESC’ene? Det kan være en av grunnene til at copteret oppfører seg slik.
Har iallefall forsøkt med fremgangsmåten fra denne artikkelen. Før startet de på forskjellig tidspunkt. Nå starter de iallefall synkronisert.
Har du prøvd å enten ta av propellene eller holde det nede og kun øke throttle? Øker alle motorene jevnt, eller øker de forskjellig? Har du prøvd å bytte om på motoren som ikke virker ordentlig og en av de andre og gjøre akkurat det samme? Flytter feilen seg med motoren, eller holder den seg på det samme? Hvis feilen flytter seg, er feilen enten motor eller ESC, så bytt om ESC’ene. Holder feilen seg på samme motor, er feilen på kortet og det er enten problem med uC på kortet eller programmet.
Har nå prøvd med en annen motor, ESC og kapteinkuk V1.5 og funnet ut at M2 ikke reagerer på elevator. Alle motorene øker forskjellig og ujevnt.
På meg virker det som om enten er kortet ditt ikke helt friskt eller så er ikke ESC’ene likt kalibrert hvis du kun øker throttle og motorene ikke øker likt. Har du prøvd å kalibrere enten en og en ESC med mottakeren eller å koble sammen alle ESC’ene og kalibrere alle samtidig med mottakegeren? Da skulle du ihvertfall være sikker på at alle er kalibrert likt.
Jeg har også lagd et tricopter 2.5, men jeg tror jeg har lagt inn Minsoo istedenfor KK, siden jeg ikke fikk det til å virke skikkelig.
Alle ESC-ene må vel være likt kalibrert om de gir samme resultat når de er plugget i samme sted på KK? (ingen av ESC-ene reagerer på elevator når de er plugget i M2)
Da er det vel bare å innrømme nederlag og bestille nytt KK? Kanskje jeg skal gå for et annet denne gangen?
Nå har folka i Flitetest lagd tre gode filmer (de tre nyeste) om bygging av quadkopter, programmering av KK-kortet og oppsett av innstillinger på kortet. youtube.com/watch?v=B7R_B2aOiho
Jeg prøvde å reversere yaw gyro, men endte opp med å skru alle gyroene helt av. Noen som vet hvordan jeg får dem på igjen?
Nettopp montert min første quad, men ingenting vil fungere. Virker som om den lever sitt eget liv.. Har turnigy plush esc’er og hobbyking kk kort v3 flashet med 4.7X.
Når jeg skrur den på begynner alle ESC’ene å pipe 4 ganger i sekundet, noe manualen sier kommer av «invalid throttle signal», og sier jeg må ta throttle helt ned, men den er allerede helt nede.
Så, etter en tilfeldig mengde tid slutter pipingen på motorene, en etter en. En av motorene henger ofte igjen og slutter å pipe om kanskje et minutt etter de andre.
I tillegg vil ikke KK-kortet reagere, som oftest. Det armeres ikke når det skal, men noen ganger gjør det det, vet ikke hva som er forskjellig når det vil armeres og ikke.
I tillegg går en motor feil retning, hvordan reverserer jeg retningen? Har prøvd å bytte om ledningene, vet ikke hva som er galt.
Når jeg skrur yaw opp på 100% skjer det ingenting. Når jeg skrur yaw ned på 0% blinker KK-kortet to ganger ved start, og deretter skjer det det samme som ellers. Men en gang når yaw var på 0% begynte ESC’ene på en komplisert melodi og rytme, men jeg vet ikke hvorfor de gjorde det den gangen og ikke ellers.
Kort sagt, jeg får ikke motorene i gang, og ingenting ser ut til å reagere med noe som helst. Har testet radioen, og den fungerer. Har også prøvd mange forskjellige måter å koble motorene og radioen til KK kortet uten hell.
Velkommen etter:) vi er etter hvert mange tror jeg som sliter med noe av det samme. Selv har jeg krasjet to ganger, og bestilt mitt tredje KK kort.
Flitetest har laget noen bra videoer, som det er linket til over. Men jeg syns KK setup videoen handler mer om å kontrollere at at er riktig før du flyr. Ikke så mye om hvordan en løser problemene. Og da er en på en måte like langt.
Så mitt brennende ønske et at noen som har fått det til, altså Kk kort oppsettet, lager en film og legger ut. Jeg har lest og studert i time etter time, dag etter dag, men mangler fortsatt kunnskap om mange av begrepene. Bilder forteller mye mer enn ord.
Geir: takker for kommentar over. Den roterer ikke så mye, sakte 360 grader,, før den går i bakken. Og enda så mye jeg har lest og prøvd, så må jeg bare innse at jeg ikke får til å reversere kanalen for pitch på radioen heller. Jeg har en TGY 9. Tips?
youtube.com/watch?v=B6m49Cw3OFU
Kan ikke hjelpe med versjon 4.7, men med den originale firmwaren fra HK fungerer det for meg å koble motorene slik som beskrevet i artikkelen her. Jeg har også Turnigy hastighetskontrollere, og de oppførte seg også merkelig inntil jeg fikk kontrolleren til å kalibrere dem. Etterpå piper de i kor, og motorene starter opp samtidig. Jeg har også Turnigy 9x (konfigurert som mode 3, siden jeg ikke har fått somlet meg til å flytte throttle over på venstre side), og måtte reversere elevator og rudder. Det gjøres ved å gå inn i menu->func setting->reverse. Trykker du på exit går du ut uten å lagre endringene. En uhyre nyttig funksjon på denne fjernkontrollen finner du under menu->func setting->display. Da kan du se hva du faktisk sender for alle kanalene. Under menu->system setting->stick set kan du forøvrig velge mellom mode 1-4. Armering med stikka ned og til venstre forutsetter at du har valgt mode 2 eller 3, ettersom kontrolleren sjekker kanalene throttle og rudder/yaw. Du må koble kanal 1 på mottakeren til AIL på kontrollerkortet, kanal 2 til ELE, kanal 3 til THR og kanal 4 til RUDD, slik som det er beskrevet her i del 2 av byggeveiledningen. Et nyttig triks for å sjekke at kontrollene oppfører seg som forventet er å koble kontrollerkortet fra mottakeren, og koble den motorkontrolleren der alle ledningene er intakte direkte til en kanal på mottakeren. Du skal nå kunne styre motoren med den tilsvarende kanalen på senderen.
Jeg tror jeg nærmer meg nå, etter lydene på motorene å bedømme i hvert fall(høyere hastiget = høyere tone og motsatt)
youtube.com/watch?v=Fjn5yZ69vU0&feature=g-upl
Men fortsatt er quaden ustabil når jeg tar på propellene og forsøker å løfte den fra bakken.
Lett rotering, eller drar til venste eller høyre, noe ulike reaksjoner hver gang.
Jeg antar det er finjusteringer på fjernkontrollen, og har forsøkt det i det «uendelige». Men har fortsatt ikke kontroll i lufta som nevnt. Noen flere tips?
Hei!
Kan noen anbefale noen propeller som passer til DT750 motorene? Propeller er det eneste jeg mangler nå. Men det er jo så mye å velge i. Jeg vil helst slippe å borre opp hullene for å få de til å passe. Finnes det noen med gjenger f.eks som passer rett på?
Jeg bruker disse:
finn.no/finn/torget/tilsalgs/annonse?finnkode=35123666
Selgeren er rask og når du har etablert en «relasjon» så har du propeller dagen etter om du trenger det. (dvs etterskuddbetaling)
Det er ikke gjenger og 4mm adapteret er for tynt til å gi stabilitet. Dette har jeg fikset ved å fjerne plasten i 4 låsemuttere og snudd dem oppned. Da sentrerer propellen seg (pga den lille opphøyningen på låsemutteren)
Anbefaler å smelte bort plasten i låseringen. Da blir de lettere å skru på. Legg dem i aluminiumsfolie og benytt anledningen til å grille en kotelett også 🙂
Jeg opplever dette som stabilt og godt nok. Husk å bruke en ugrillet låsemutter i tillegg.
Takk for svar:)
Du har vel ikke et bilde av hvordan det ser ut ferdig montert?
….og bruker du 10 eller 12×4.5?
Propellene er 10×4,5
Bilde
img138.imageshack.us/img138/4452/img0447zs.jpg
Det synes at den nederste mutteren lå i grillen 🙂
Låsemutter på toppen og avkuttet aksel
Hei,
Jeg har et KK Quad X V4.7 kort, men vet ikke hvordan motor rekkefølgen skal være. Har funnet flere forskjellige forslag. Har prøvd alle med samme utslag. Helikopteret tipper fremover og til høyre uansett hva jeg gjør. Selv om jeg har stikka helt tilbake og venstre tipper den frem og til høyre.
Jeg har lagt merke til at jeg ikke trenger å armere helikopteret…
Noen som har noe forslag til hva problemet kan være?
Kan det være at trimmen på fjernkontrollen trenger justering?
Jeg har prøvd å justere trimmen, så det nok ikke det.
Jeg byttet om på to motorer (høyre foran og venstre bak) og nå svinger/ vipper helikopteret motsatt. Kan det være en forskjell på en eller flere motorer?
fpv.no/vbulletin/archive/index.php/t-850.html?s=0dccc2369bcb001a5b9bb52e6e441229
Eg har bygd meg eit hexacopter med KK controller frå Hobby King. Slit litt med å få det til å virke. Når eg gir på throttle byrjar copteret med ein ocillerande heller brutal bevegelse i staden for å stige roleg opp. Nokon som har tips vedr dette?
Virker som om du har gain altfor høyt. Prøv å redusere gain og se om det hjelper.
Noen som har forslag omkule LED lys på quadkopteret
Hobbyking har noen forskjellige farger. billig også.
hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=8940
Hei!
I dag fikk jeg liv i quadden for første gang:) Flaks jeg ikke hadde på porpeller for alle motorene starta med en gang jeg plugga i strømmen:)
Det er nok mye galt her, men det jeg stusser på først er at jeg ikke trenger å armere korte for å styre motorene. Jeg bruker et kk pluss v4,7 X fra mulicopter.
Jeg så nå at det faktisk er et innebygd strømfordelingskort i dette kortet. Er det sånn at jeg må lodde på strøm rett i kortet for at det skal fungere skikkelig? Holder det ikke med strøm fra esc’ene sånn det er på hobbyking kk kortet? Ser jo at det er litt liv i kortet når jeg plugger i strømmen med kun esc’ene koblet til.
Jeg finner liksom ingen bruksanvisning på mulitcoptersiden….
Stian
Jeg mente selvfølgelig kk kort fra multircshop.com/
Å skåne KK-kortet for vibrasjoner er veldig viktig.
Jeg fikk ikke styring på copteret før jeg moterte hele «cokpiten» på fire skumgummiklosser og skruer med frihull slik at cokpiten flyter på skumgummien. Et annet råd: Kjøp masse strips og propeller. Gi ikke opp, plutselig ordner ting seg.
Hvis du leser byggetrinn 1 (link øverst på siden) ser du at de beskriver hvordan kortet bør festes.
De har brukt mange lag med «dempende» dobbelsidig tape for å feste KK-kortet til ramma.
(En tjukk splætt med glass-silikon gjør nok samme nytten.)
Tapevarianten hjalp ikke så mye på mitt copter, men det kom kanskje av at jeg ikke hadde avbalansert propellene nevneverdig.
Ta en titt:
vimeo.com/45023318
I byggebeskrivelsen:
«Først ville bare quadkopteret oppføre seg som en karusell. Det roterte rundt og var helt umulig å styre. Da var det den ene gyroen som måtte reverseres. Den såkalte Yaw-gyroen. Den holder orden på rotasjon. Og når den i utgangspunktet var satt opp “feil vei” drev den og forsterket rotasjon i stedet for å hindre rotasjon»
Men jeg får ikke til:
«For å reversere en gyro gjør du følgende:
1: Set roll-potmeter til null
2: Sett strøm på batteriet / KK-kortet
3: LED-lyset på kortet blinker 10 ganger
4: Flytt litt på stikken for den gyroen du vil reversere
5: LED-lyset begynner å blinke kontinuerlig
6: Trekk ut batteripluggen / strømmen til kortet
Led lyset bare blinker veldig hurtig mens det piper: pip—pip—pip—pip
Så jeg får ikke til å reversere yaw-gyroen, eller noen annen for den del.
På dette filmklippet tester jeg med 4.7 i X. HK Control board V3.0.
Hjelp !! 🙂
Dette var veldig kjent. Jeg gikk gjennom denne lista i forrige uke og hadde problemer i starten. Det jeg gjorde var å armere kortet først (da blinket det kjapt 10 ganger) og deretter flytte stikka til venstre (motsatt side av armeringa)
Så trakk jeg ut strømmen og skrudde roll potmeteren tilbake til 50% (jeg har 4.7 i +)
Bingo. Håper det hjalp
Ny versjon av KK-kontrolleren, med akselerometer og LCD-display. hobbyking.com/hobbyking/store/__24723__Hobbyking_KK2_0_Multi_rotor_LCD_Flight_Control_Board.html
Video her: youtube.com/watch?v=ZB9PAEzwkqo&feature=player_embedded
Rolf R Bakke er et unikum, og det er hyggelig å se at også norske genier får litt anerkjennelse – om enn ikke allverdens av kroner. Han får «royalties» fra det Hobbyking selger, ære være dem for det, men det kan umulig komme i nærheten av det han fortjener for det han har gjort for denne hobbyen.
Alle som nyter godt av disse dritbillige kontrollerkortene burde sende en generøs donasjon til ham – jeg foreslår fem hundre kroner for alle som har hatt gleden av å få en av disse farkostene i luften – og du kan gjøre det via https://paypal.com (epostadressen hans er [email protected])
Jeg har sendt en litt større donasjon selv og det fortjener han, både for det han har skapt og for å være en inspirasjonskilde for oss andre.
Takk for tipset.
Den er nå bestillt.
Ser ut som om den har en self-level funksjon. Gleder meg til å teste. Er i ferd med å gå over til tricopter nå.
Hei, jeg skrur på strømmen og hører de 7 pipene men får ikke noe respons når jeg «gasser på». Noen som har hatt det samme problemet eller kjenner til feilen. please hjelp meg. 😐
Det er en sikkerhetfunksjon.
Du må ‘aktivere’ kortet før du kan fly, slik at du ikke uheldigvis har fullkass når du kobler til strømmen.
Om jeg husker rett, så skal du ta venstre spak ned til høyre, og høyre spak ned til venstre.
Takk for tipset men det funket dessverre ikke for meg.
Prøv dette, som står i guiden ovenfor:
«Selve KK-kortet har en sikkerhetsmekanisme innebygget. Så det våkner ikke før du slår det på ved hjelp av fjernkontrollen. Dette gjøres ved å ta venstre spake helt ned og mot høyre i ca 5 sekunder. Eller forklart på en annen måte: “throttle” helt ned og til høyre. Dette fordi du da er helt sikker på at ikke farkosten gir bånn gass uten kontroll når du setter i strømmen (dersom fjernkontrollen hadde gasspedalen eller “throttle” på fullt).»
Kan det være at trimmen på fjernkontrollen hindrer deg i å treffe (Venstre spak skal ned og til høyre på mode2 kontroller) Ta denne spaken til armeringspunktet, hold den der og juster trimmen.
Jeg hadde samme problemet i begynnelsen. Viste seg å være trimmet bort fra armeringspunktet.
Er bare 12 år, så skjønte lite men noe. Hvordan får jeg den røde LED dioden til å lyse? Har slått på stømmen og radioen men det går skjelden. er det en teknikk på det?
Glem det!!:)
Takk til Merko og Kenneth R for tips!! Merko, ditt første forslag
funket faktisk :). Jeg gjorde bare feil.
Kommer sikkert tillb m flere spm 🙂
ho – ho – ho -ho !!! i dag stakk quadro`n ENDELIG til himmels – men HELT ufrivillig.
Jeg skulle reversere elevator på fjernkontrollen. Men gjorde en brøler og reverserte throttle i stedet !!
Mens batteriet var tilkoblet.
Resultat: Quadro`n tok av i expressfart. Men gikk heldigvis i bane retning en tretopp der den krasjet.
Advarsel: gjør ALDRI samme feilen. Dette kunne gått værre. Jammen bor det krefter i den firarma tassen.
Hei!
Noen som kan bistå litt? Jeg har plugga i alt nå. Men det er noe som ikke stemmer. Når jeg plugger i strømmen så piper det. Tror det piper sånn det skal. Men så stopper pipinga. Det skal vel pipe helt til kortet er armert? Jeg trenger ikke å armere kortet her. Jeg kan bruke trottelen med en gang. Men det er det eneste jeg kan også. ikke noe annet som funker. Noen som har noen formening om hva som er galt? Her er en video:
youtube.com/watch?v=1ayTSoyXpGk
Har akkurat samme erfaring men ennå desverre ikke funnet noen som kan hjelpe meg med dette.
Nei, det skal ikke pipe helt til du armerer. Når du setter på strømmen skal hastighetskontrollerne pipe og så gi seg. Hvis du ikke allerede har gjort det, er det viktig at du får KK-kortet til å kalibrere hastighetskontrollerne. Gjør du ikke det, vil de ikke starte samtidig, og heller ikke pipe som beskrevet. Jeg har lagt merke til at i alle fall 4.7-versjonen armerer seg selv hvis jeg ikke har slått på fjernkontrollen før jeg plugger inn batteriet i fjernkontrollen. Har du sjekket at throttle og yaw/rudder går riktig vei? Programvaren i KK-kortet armerer når throttle og yaw står på minimum (nede til venstre), og desarmerer når thottle er på minimum og yaw på maksimum (nede til høyre). Dette forutsetter at du har en fjernkontroll som er satt til mode 2, og at throttle og yaw ikke er reversert i forhold til det kortet forventer. Det kan være at fjernkontrollen din har en modus som lar deg se hva du faktisk sender når du beveger stikkene.
KK-kortet funker helt utmerket hvis man får med seg *alle* detaljene i byggebeskrivelsen 🙂
Takk Kenneth, gode hjelper:) jeg får fortsatt ikke til å reversere ved beskrevet metode. MEN, styra litt i går kveld, skrudde alle potmetrene i alle retninger, og så plutselig var yaw gyro reversert, og rotasjonen borte. Men aner ikke hva jeg gjorde egentlig.
Var nå i ferd med å bestille Dji naza, men siden jeg må bestille flere motorer (krasj i går), skal jeg gi den nye versjonen av KK kortet en sjans.
Hei,
Hvordan får man strøm til mottakeren? Kan man ta dette fra KK-kortet eller speedkontrollerene?
Mottakeren får strøm fra KK-kortet.
Takk for svar. Er det uttak på KK-kortet for dette, og evt hvilket?
Det går strøm gjennom signalkablene. Så det er bare å koble det som skal kobles og strømmen går gjennom disse
I et lyst øyeblikk kom jeg på noen smarte ben som fungerer supert (og da må vi jo dele)…
Kleshengerbena som jeg brukte først hadde en tendens til å bli bøyd, og sette seg fast i plenen ved litt harde landinger (som jeg fortsatt har en del av :).
Som følger:
To lange treskruer (borr hull først så det ikke sprekker), og 25cm elektrisk trekkerør.
bayimg.com/pAALpaaek
.. så bøyes røret og tres ned på skruene
bayimg.com/AAAmbAaeK
.. litt fluoriserende spraylakk på frambena, og viola!
bayimg.com/aaAmiaaEK
Disse tåler juling, fjærer fint og tar mye av støtet, ved harde landinger, og er kjempeenkle å reparere.
Hvis landingen har litt mye horisontal bevegelse (som jeg også fortsatt har en del av 🙂
sklir riggen fint bortover istedet for å tippe rundt.
Forøvrig bruker jeg nå det nye KK2.0 kortet m/LCD fra HK som virklig er en ny verden i forhold til oppsett og kalibrering.
..tror jeg vil kalle dem… «Snaiklegs» 😎
God idé. Det *ser* bra ut, også.
Hvor mye veier plasten og skruene tilsammen ?
..har ikke veid de separat. Det kommer vel litt an på skruene.. men plasten veier nesten ingenting.
Hele farkosten m/2800 batteri veier nå ca.950 gr.
…etterlyser forøvrig igjen bilder av alle de fantastiske doningene der ute… ikke vær flau 🙂
Jeg har et lite spørsmål. Kan disse ørsmå festeskruene på motorskaftet på DT750 motorene erstattes med vanlige maskinskruer av samme diameter størrelse? Jeg ser at de originale er rundet i enden. Har erfart at de ristes lett løs og har mistet flere allerede.
Noen som har opplevd det samme?
Maskinskruer kan nok brukes, men ville prøvd å skaffe nye skruer av same type. Er maskinskruene veldig spisse bør du file dem ned, før du eventuelt tester dem ut.
Bruk loctite på skruene så ungår du at de ristes løs, jeg har ikke mistet en skrue etter jeg påførte loctite etter en av de første flyturene.
Mange takk. Får prøve å få tak i nye skruer. Og loctite også, for de ristes lett løs hvis de ikke er skikkelig tilskrudd har jeg merket. Inntil jeg får tak i nye skruer ser det ut til at motoren holdes på plass med den ene som er igjen.
Loctite bør brukes her ja. Men pass på at du bruker den riktige typen – den andre typen er beregnet på permanent montering og det er litt kjipt hvis du plutselig får lyst til å demontere noe.
Blå Loctite er den riktige til vår bruk. Den røde er beregnet på permanent montering.
Mistet noen av disse skruene jeg også, fant nye på ebay (M3 3MM X 3MM).
Ellers hadde jeg en liten krasj, som bøyde hele motorfeste, klarer ikke for alt i verden å finne erstattning, noen som har forslag? Eller blir det helt ny motor?
Hei, som mange andre her har jeg blitt bitt av basillen… og mye vil ha mer. her er en link til mitt nyeste prosjekt, med utgangspunkt i denne artikkel serien.
Hexcopter: youtube.com/watch?v=CVHJjtXRz9Q
Bygd av alu-rør ++ og har en DJI NAZA controller ombord, 5000mAh 3S batteri gir godt med flytid…og den greide å løfte 1,5 kg fra bakken.
Kjempefin artikkel og mange gode innspill fra alle som er blitt hektet…
Øyvind
Hei, jeg nærmer meg ferdig. Har KK Plus V5e med XXController fra Mike Barton. Jeg har kjørt oppsettet som forklart i medfølgende readme-fil. Kontrolleren er Synergy 2,4GHz. Det jeg synes er merkelig er at motorene starter ikke før throttle-stikka er på ca 40%, og er på maks når stikka er på ca 80%. Er det noen som vet hva jeg må justere for å endre dette slik at throttle blir fordelt over hele «rangen» til stikka?
Svend
Fikk svar på forumet til Hobbyking. Kontrolleren var ikke kalibrert fra fabrikken. Fungerer glimrende etter kalibrering.
Har prøvd det meste nå, tror jeg, men har fortsatt ikke knekt koden med å få en farkost stabilt i lufta. Har kjøpt fire forskjellige kort, tre sett hastighets kontroller, et utall motorer, og bygd frem farkoster. Alt utprøvd i en mengde kombinasjoner.
Her den siste jeg har bygd:
flickr.com/photos/torst1/8040679500/in/photostream
Skal være mer stabil ifølge Flitetest, men foreløbig har jeg ikke merket noe til det.
Og her en OK løsning til landingsføtter syns jeg:
flickr.com/photos/torst1/8040685746/in/photostream
Laget av kryss til rørisolasjon kjøpt hos Biltema.
Veier bare noen gram, og ramler ikke mellom gulvbordene under testing på terrassen, slik kleshengerne gjør.
Noen som vet hva som har skjedd med:
kkmulticopter.com/
Har ikke vært mulig å åpne siden på ukesvis.
Men gir ikke opp. Den største feilen er at farkostene hiver seg rundt når jeg trar på trottle.
Trimmer pot og radio, men hjelper ikke. Dvs, noen ganger er jeg der nesten, men så er det tilbake til gamle synder.
Er det forresten noen her på forumet og som har fått det til som bor i nærheten av Ålesund. Da kunne jeg godt tenke meg et besøk:)
Et par skrivefeil: fem farkoster og drar på trottle, skal det være
Wow. Med den mengden pågangsmot kommer du garantert til å klare dette. Ser du har et KK2-kort i den siste farkosten. Det er meget stabilt og skal være enkelt å sette opp. Men min erfaring er at det IKKE duger til autostabilisering ennå. Rolf jobber i følge ryktene med bedre autostabiliseringskode.
Men: KK2 i «rate-mode» er som på skinner hos meg.
At det drar skjeivt / flipper over når du gir gass tyder jo på at en eller to av motorene ikke henger med.
Jeg ser på bildet at du fremdeles bruker sukkerbiter. Når du har kommet så langt som dette bør du gå over til å lodde eller bruke små bananplugger med gullbelegg. Sukkerbitene er fine under innledende tester og eksperiment, men når du er på rigg nummer fem kan du trygt bruke noe mer stabilt.
Jeg har selv hatt problemer med at riggen ikke drar rett opp når jeg gir full throttle, men den flipper ikke over.
Hva er problemet med denne siste riggen med KK2? At den flipper når du gir gass?
hei igjen Eirik,
Hvordan setter du KK2 kortet i «rate-mode»?
Har bladd meg igjennom menyene på kortet, men finner ingen ting om det.
Litt dårlig forklart av meg. KK2-kortet har to modus. Den ene er basert på stabilisering ved hjelp av gyroer alene. Akkurat som det gamle KK-kortet. Bare mye mer stabilt likevel. Denne kalles «rate-mode».
Den andre er auto-level som bruker aksellerometer. Jeg har aldri fått den til å fungere spesielt bra. Den er for treg og seig sammenlignet med andre kort som autostabiliserer. Denne kalles mange steder «stable-mode»
I rate-mode vil farkosten fortsette i den retningen den hadde når du slipper spakene, i stable-mode vil farkosten rette seg opp selv.
Jeg husker ikke de nøyaktige instruksjonene til KK2, men det er godt mulig «rate-mode» aldri nevnes. Men: det er så enkelt som at du kan slå av og på aksellerometeret. Som oftest med en bryter på kanal 5. Når aksellerometeret er på er du i «stable-mode», når det er av er du i «rate-mode».
Enig med Eirik Solheim når det kommer til disse sukkerbitene.
Kan anbefale «Bullet Connector». Da lodder du bare en liten sak i hver ende, slik at du enkelt kan demontere om du har behov for det. Mulig det er det samme som disse bananpluggene Solheim snakker om? :p
Her er iallefall de jeg kjøpte tidligere:
hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=9284
Ja. Fant ikke noe bedre norsk ord enn bananplugg. Men skal jeg være nøyaktig er vel det HK kaller en «bullet connector» en slags veldig kort bananplugg. Vet egentlig ikke hva de heter på norsk. «Kulekobling»? 🙂
Iallefall fra nå av så gjør de det 😛
Hei Eirik Solheim!
Jeg har allerede en walkera lama 3 som jeg har montert kameraet mitt på, men er sykt interessert i quadcopter.
Men så har det seg slik at jeg har radio, mottaker og noen batterier som jeg lurer på om er brukbare. Kunne dere fortalt meg om disse fungerer på quadcopteret dere beskriver her?
Radio: myrcmart.com/images/upload/Walkera-2602-Transmitter-LCD-01.jpg
Mottaker: rcbutikken.no/produkter/walkera-lm3/walkera-hm-lama3-z-59–receiver–rx2429-.aspx
Batteri: rcbutikken.no/produkter/walkera-lm3/walkera-hm-lama3-z-55–lipo-battery–11-1v-2200mah-.aspx
Takk for svar! 😀
Beklager sent svar på denne. Både fjernkontroll, mottaker og batteri bør kunne brukes til quadcopteret vi har skissert her. Med forbehold om at vi ikke har testet akkurat denne kombinasjonen, men minst fire kanaler og trecellers batteri på 2200 mAh er jo innenfor spesifikasjonene våre!
Hei, har du fått testa om den radioen/motakeren fungerer på en quad? Lurer på det samme, siden jeg har samme helikopter selv:) Walkera lama 3
Mange takk Eirik og Merko for oppmuntring, og nyttige tilbakemeldinger.
KK2 kortet er enkelt å sette opp ja, og har flere nyttige funksjoner, som f.eks. radio signal testing. Men autostabilisering? tja..jo… kanskje det er det som er problemet?
vimeo.com/50892542
Farkosten virker ikke stabil når jeg forsøker å lette. Den drar litt opp på ene siden, jeg trimmer så litt på radioen, den drar så skjevt opp fra andre siden, foran, bak. Føler at dersom jeg gir for mye så vil den flippe rundt. Men «rate-mode» har jeg ikke prøvd.
Skal bli spennende å se hva Rolf kommer med neste gang.
Har bestilt bananplugger, men var ikke klar over at de kan bestilles w/protector, så takk
for tipset Merko. De skal bestilles etter hvert.
I mellomtiden har jeg prøvd disse koblingene kjøpt på Biltema:
flickr.com/photos/torst1/8059876038/in/photostream
Men tror ikke de er så bra, for motorene hakket i hvert fall.
Men det kommer en dag…om ikke så lenge nå tror jeg:
Ser akkurat ut som mitt problem.
vimeo.com/37461773
Har også beskrevet dette lenger opp på siden her.
Hvilken firmware er best?
Jeg har et KK Plus-kort, som jeg har lastet in Mikes sin firmware V1.5i, pga LCD-støtte. Er det noen som har testet denne firmwaren mot KK sin V4.7, og hva er evt forskjellen.
Jeg har tatt et par forsiktige turer, og ser at kopteret ikke autojusterer seg. Dvs at det ikke planer ut når jeg har satt i gang en bevegelse. Er det mulig å få dette kortet til å gjøre det?
Svend
Har ikke prøvd annet enn 4.7. De originale KK-kortene har ikke autostabilisering, og det er ikke noe du kan aktivere i programvare. Det krever ekstra hardware i form av et aksellerometer.
Her er mitt forhold til autostabilisering: begynte å fly med vanlig KK uten autostabilisering. Kjøpte så OpenPilot CopterControl og ble meget imponert over autostabiliseringen og må innrømme at det ble lettere å fly.
Så har jeg testet flere kort med autostabilisering. Naza, FreeFlight, Rabbit og MultiWii. Men: etter hvert som jeg har blitt flinkere til å fly har jeg gått tilbake til å stort sett fly uten autostabilisering. Det gir mye større frihet og faktisk også penere bevegelser til for eksempel filming.
Og hva mener du med større frihet? Noe slikt som dette:
vimeo.com/50946966
…for denslags må aksellerometeret være slått av. Copteret jeg bruker i den videoen har et KK2-kort.
Wow, du er jo proff nå 🙂
Bra flyging!
Takk! Ikke helt Warthox, men det begynner å bli moro å mestre disse små farkostene skikkelig i tre dimensjoner. Å fly slik krever ganske intens konsentrasjon, noe som igjen fører til at dette blir skikkelig avkobling.
Unektelig ganske fet flyving. En hard dag for den lille piloten som satt i kopteret 🙂
Har KK Pluss 5,5e med Mems module. Programmert med XXController 1.6jMEMS. Med dette kortet har jeg endelig klart å mestre modellflyging etter mange år med knuste modeller. Hadde gitt opp denne hobbyen men etter et program på NRK om multikopter og byggeveiledningen på disse sidene, har jeg nå mange flyturer med denne fasinerende farkosten. Noen knekte propeller har det blitt,men det var før jeg installerte mems modulen og autostabilisering. Og dette er bare begynnelsen.På sikt håper jeg å kunne fly FPV og kanskje få istallert GPS.
Kjøpte du mems-modulen løst? Jeg har også KK Plus, men er usikker på om det holder med denne i tillegg: multircshop.com/site/index.php?route=product/product&product_id=626
Kjøpte KK Pluss kortet først. Utvidet så med MEMS modul, PPM og LCD kort. Fulgte byggeveiledningen og oppjusteringen som anbefalt (enkelt ved bruk av displayet) og Quaden fløy stabilt ved første takeoff.
Ok, så man trenger ppm-modulen også? Hva gjør den?
Info finner du her:
multircshop.com/site/index.php?route=product/product&product_id=599
Takk, da er det bare å vente på pakka.
Hei.
Jeg lurte på en ting
Når en propell er som for eksempel 10*4,5 i dette tilfellet. Vil det si at propellen er 10 cm i diameter?
Jeg har nemlig også byggd et quadcopter. Og jeg så at dere hadde 56 cm mellom motorene, og at propellene 10*4,5 passet bra. Men jeg har bare 50 cm mellom motorene og lurer derfor på om jeg har plass til de samme propellene som dere bruker?
Fra motortuppene mine er det forresten 18 cm inn til boksen hvis det hjelper 🙂
Håper noen kan svare 🙂
Propellene er 10 tommer lange. Det vil si at de er totalt ca 26 cm. Siden de festes midt på trenger de da en avstand til neste propell og inn til midten som er minst 13 cm.
…med andre ord går det fint å ha 10″-propeller på din quad også.
Takk:)
Hvorfor er det slik at alle andre unntatt meg får svar, begynner å bli sur her nå….
For de av dere som vil ha en annen kontroller enn KK eller Naza, nå er det mulig å få bestilt en OpenPilot CC3D på . Eneste planlagte salg av kort (ca 700stk) ble utsolgt på under en time… Nå er en Kickstarter-type bestilling underveis og man har til tirsdag 1/11 kl 23:00 Melbourne tid til å være med. Planlagt produksjon er minimum 300 kort.
Okey, den linkingen fungerte visst ikke helt etter planen, men linken i teksten er ihvertfall riktig… 🙂 Stedet å bestille på er Openpilot Store.
Ikke klarer jeg å lese kalenderen riktig heller… 🙂
Riktig dato skal være tirsdag 30/10…
Da har guttedrømmen gått i oppfyllelse 🙂 Delene som ble bestilt i januar har blitt satt sammen på foskjellig vis men nå har jeg funnet en stabil versjon som jeg synes flyr bra. Nå er det bare å lære seg å fly. Legger ved skrytevideo:-) Takker for inspirasjon og hjelp gjennom disse to artiklene. Så mye moro for så lite er det skjelden man kan ha.
youtube.com/watch?v=Uyoqg6Z7Hbw
Hehe. Ting tar tid. Men den ser jo ut til å fly kjempefint. Da er det bare å øve, så flyr du akrobatisk før du vet ordet av det.
hvor mye løft gir hver motot sånn ca
Det kjem an på motor, propell og kor fort den går.
På hobbyking har dei på enkelte motorar oppgitt informasjon om dette.
hobbyking.com/hobbyking/store/__17923__NX_4006_530kv_Brushless_Quadcopter_Motor.html
Denne gir mellom 288 og 1175 g løft med dei testa propellane.
DEN MOTOREN OG PROPPELEN NRKBETA ANBEFALER MEG
Hei,
Jeg strever med å få quadkopter mitt stabilt. Helikopteret bare snurrer rundt seg selv til venstre. Jeg har prøvd å trimme på kontrollen men det hjelper ikke.
Jeg har lagt merke til at motoren fremme til venstre letter alltid sist. Jeg har byttet motor men ikke noe forandring. Noen forslag?
Det høyres ut som om yaw-gyroen må reverserast (for å stoppe snurringa) og ESC-ane må kalibrerast (for å få starta motorane samtidig). Dette finn du ut korleis ein gjer i manualen til kontrollkortet du brukar.
Hei Reidar, takk for svar. alle motorene starter likt, men skal prøve å kalibrere ESC-ene for det. Det følgte ikke med noe manual til kortet men skal prøve å finne en på nettet.
Nå har jeg reversert yaw-gyroen det ble bedre, men helikopteret har en tendens til å gå fremover av seg selv. Helikopteret letter ikke likt, benet til venstre fremme letter alltid sist. Virker nesten som om den er tyngst, men det er den ikke. Har veid helikopter og alt er så og si likt, noen få gram forskjell bare. Kan det være at den ene ESC’en er «svakere»? Har byttet på motorene og de er like.
Jeg har KK Plus med MEMS module, og kjører XXController 1.6j-firmware Jeg har litt problemer med å konfigurere den slik at den ikke oscillerer.
Skal man trimme Acc-Gain eller Roll/Pitch-Gain?
Hvis det er noen som har fått til dette, er standardverdiene veldig feil?
Du finner litt info på disse sidene om konfigurering:
rcgroups.com/forums/showthread.php?t=1445151&page=220
Jeg kjører med oppsettet fra MENU.pdf som fulgte med 1.6j-firmwaren. Det har ikke vært behov for justering av disse verdiene for å få min quad til å fly stabilt.
Takk. Skal prøve det.
Har du fått til å skifte mellom acro og den andre modusen? Kan man se hvilken modus man er i?
Du finner status på displayet under menyen DIAGnostics/Rx/Aux.(Se i MENU.pdf). Bytter mellom Acro og Stable med kanal 5. Jeg satte CH 5 på radioen min (Turnigy 9x) under menyen AUX-CH til Gear. Sjekk om skiftet skjer ved hjelp av displayet. (DIAGnostics)
Hei!!
Jeg har fått et lite problem. Jeg kjørte quaden min ganske hardt inn i pipa, som resulterte i at den ene armen knakk. Jeg har nå bygd den opp igjen men jeg får ikke motorene til å gå rundt. Kan dette han noe med krasjen å gjøre?
Det kan også kanskje være en annen grunn. før jeg krasjet skulle jeg prøve å reversere den ene gyroen og jeg hadde ikke lest godt nok, derfor drev jeg å skrudde lit rundt på alle pot-ene. (vet hvordan det gjøres nå) Det som gjorde at jeg krasjet var at jeg hadde klart å gjøre så jeg ikke trengte å armere kortet, så etter jeg hadde koblet til batteriet var det bare å kjøre. men det viste ikke jeg og da fløy quaden min inn i pipa.
Når jeg nå kobler til batteriet piper motorene førts «pip-pip-pip» og blinker lyset veldig fort 10 ganger eller noe spnt og så piper motorene «pip – pip – pip – pip – pip – pip…….og så videre og de stopper aldri. Så da blir det pip-pip-pip – pip – pip – pip – pip – pip – pip……
Håper noen vet hva problemet er??
Hei, det er nå snart ett år siden jeg hadde mitt første quadcopter i lufta, bygd etter beskrivelse her på NRK Beta. Det er lett å bli bitt av basillen, og jeg har etterhvert bygd flere ulike modeller.
Sjekk ut denne:
youtube.com/watch?v=OYWzlejHfy8&feature=results_video
Dette er den siste modellen, ett hex-copter, hvor skal dette ende…?
Hilsen
Øyvind
Noen som kan anbefale hvilket KK-kontrollerkort jeg burde kjøpe, når jeg vil ha et som er bedre en den dere anbefaler i del 1? Vil ha en som er «neste genrasjon» lizzom. Har sett litt på LCD flight controll board fra hobbyking, kan den fungere bra? setter pris på om jeg kunne få noen forslag, som gjerne er fra Hobbyking. 🙂
LCD-kortet fungerar kjempebra. Det er veldig fint å få info på skjerm og knappar til å styre med. Mange slags motoroppsett er ferdig lagt inn, alt kan stillast inn enkelt nog intuitivt direkte på kortet (inkludert trimming av kanalane). Det einaste som ikkje var heilt rett fram var å kalibrere ESC-ane. Men det var enkelt når eg fann manualen, hald inne knapp 1 og 4 medan du koblar til batteriet.
Det har og stabiliseringsmodus som du kan slå av og på med ein kanal på radioen.
Uten tvil KK2 med LCD. Det er MYE enklere å sette opp, er billig sammenlignet med annet tilsvarende og har en strålende autostabilisering etter firmware 1.4. Den gjør at det blir mye enklere å fly.
Takk for svar, Regner med at ingen vet svaret på det andre problemet mitt er, så da er det vel best å kjøpe et nytt kort.
Men vet dere om det går an å få kjøpt det LCD kortet her i norge?
Med mindre Rolf Bakke har et eget lite garasjeutsalg borte i Bergen er det nok HobbyKing som er stedet for å få tak i dette kortet. De pleier ikke å være så ille på leveranse så du bør ha det i hus innen 14 dager. Raskere om du velger ekspresslevering.
jeg er en gutt på 15 år jeg er nå ferdig. jeg klarte det da burde alle klare det
Ja hvor skal dette ende,som Øyvind her sier. Det er snart ett år siden jeg også ble bitt av basillen. På den tiden har jeg bygd en fem-seks quadrokopter og holder i øyeblikket på med et tricpoter.
Jeg har prøvd fire kontrollkort, fire sett hastighetskonroller og jeg har vel en 16 motorer liggede. Jeg har strevd fælt med å knekke koden. Men plutselig skjedde det, og da er det KK2 kortet jeg vil gi æren for det, siden det var spørsmål her fra Andeas om hvilket kort har bør velge.
Følger du anbefalingene her:
rcgroups.com/forums/showthread.php?t=1675613
så får du garantert farkosten i lufta.
Det ser så enkelt ut på video når andre flyr. Men det jeg så opplevde er at det er trening og atter trening med fjernkontrollen (jeg hadde nesten ikke tatt i en fjernkontroll tidligere)som kan ta deg videre i denne fantastiske hobbyen.
Hei, jeg har nå lest gjennom alt på denne artikkelen og ALLE kommentarene og nå MÅ jeg bare lage et guadcopter…
Drømmen er jo da å bruke FPV utstyr senere. Så tenker å begynne med noe som kan brukes til FPV senere…
1. Kontroll – da ser jeg på spektrum 6 eller 7 channel, mange på tilbud nå på nyåret.
2. Ser at DJI NAZA skal vere lett å sette opp og bruke. Er det da dette elefun.no/p/prod.aspx?v=22019&t=v
3. Materiale til rammen er jeg enda ikke sikker, prøver å få tak i carbon med blir sikkert i tre. Hva slags mål burde jeg velge? 12×12? Noen sier det er best å lime sammen flere tynne lag, hvorfor?
4. «Vingespennet» tenker jeg på rundt 70 eller 60cm
5. Hva slags motor burde jeg gå for og propell. Jeg har Hero 3 black edition som blir brukt til filming. Så den må kunne løfte litt, kanskje FPV senere. Har en venn som selger til GOD pris.
6. Batteri og slikt, der burde jeg vell kjøpe flere, samt med propeller og motorer?
7. Er det veldig mye å spare på å bestille fra utlandet? Orker ikke vente 🙁
Det var det jeg kom på i skrivende stund. Fint om noen har svar på dette ganske fort. Som sagt, klarer ikke vente… Min livs lønning kommer den 10. januar, så dette blir bra! 🙂
Hei!
Er det noen her som bruker Turnigy 9x radioen sammen med hobbyking kk2 kortet med lcdskjerm? Jeg lurer på hvilke innstillinger som skal brukes på radioen. Når jeg skal sjekke recivertest på kortet så får jeg tilnærmet alle verdiene til 0 som det skal være. Men aileron står på minus 6 og da har jeg brukt all trimmen. Ikke noe mer å gå på. Så da tenker jeg at det må være noe galt. Nå har jeg prøvd å sjekke litt innstillinger på radioen og rota det til skikkelig. Nå stemmer ingen av verdiene lenger. og når jeg trotler så beveger både ail og rudder seg også. Noen som har noen tips til hva slags innstillinger som skal brukes på radioen?
Usikker på hvordan du kan resette radioen; men du vil garantert få et raskere svar enten her:
modellflynytt.no/forum137.html
Eller her:
fpv.no/vbulletin/forum.php
🙂
Så videoen med elgen på nrk sine nettsider. Lurte på hva slags utstyr dere bruker? Videokamera? Sender og mottager? Googles eller en annen type skjerm?
Har postet litt mer info om utstyret her: eirikso.com/2013/01/09/moose-vs-quadcopter/
Har ikke sett dette klippet før nå.. Så sinnsykt kult..Absolutt mitt favoritt Quad FPV klipp nå 🙂
Quadcopter kan brukes til elgjakt? Confirmed! :p
er den noen som driver med dette i vestfold da, Ha noen mekke hvelder og prøve og feile kvelder her i nærheten hadde vert fint har da en Quad jeg driver og prøver å få silt litt mere riktig osv.Den flyr men vil ha den enda bedre…..
Kan anbefale modellflynytt og fpv.no som jeg nevner i artikkelen også for å komme i kontakt med andre i Norge som er bitt av denne basillen.
Tjølling (Larvik)
Ta gjerne en tur (men er stygt redd for at jeg vil ha mer utbytte av din kunnskap enn motsatt:-)
Send meg en mail på keithbylaw(a)gmail.com så vi kan avtale nærmere
Har bygget med hensyn til oppskriften men den ene motoren får bare 1/2 kraft av den andre. Den spinner opp og responderer når jeg flytter aileron stikk til venstre, men bare såvidt i forhold til den andre motoren når jeg flytter stikken til høyre. Hva kan være galt? Har prøvt «KK vodoo et par ganger».
Har bygget med hensyn til oppskriften men den ene motoren får bare 1/2 kraft av den andre. Den spinner opp og responderer når jeg flytter aileron stikk til venstre, men bare såvidt i forhold til den andre motoren når jeg flytter stikken til høyre. Hva kan være galt? Har prøvt «KK vodoo et par ganger». cxx
når jeg prøver og lete bare snur det på hode i lufta jeg tror at når den tipper lit gir den den ene for mye gas og den tipper. hva skal jeg gjøre!!!!!!!!!
Haha 😛 Har hatt samme problem selv 🙂
Alt du trenger å gjøre er å finne ut hvilken gyro som reagerer feil, så må du bare reversere den gyroen. det som skjer er at når Quaden tilter litt til den ene siden skal den motoren quaden tilter mot gi mer kraft for å rette opp quaden, men her er det motsatt. Her gir den motsatte motoren mer kraft som fører til at quaden snur seg opp ned. Så det du må gjøre er å ta quaden i hånda di. Sette «Throttle» på veldig lite, og så vipper du quaden slik at du finner ut hvilke motoere som reagerer feil. Det kjenner du ved at quaden prøver å snu seg på hodet. Når du har funnet ut hvilke motorer som reagerer feil, vet du hvilken gyro du skal reversere.
Jeg er ingen ekspert på dette her, men det var sånn jeg løste problemet 🙂 Så kan hende det finnes en annen løsning som ikke jeg vet om, men jeg syntes denne funka bra, og jeg er bare 15 år 😛
Jeg festet quaden til en krakk med lastestropper av strikk. Da ble den ikke så skummel innendørs med propellene på. Man skal helst teste uten propeller men det er lettere å kjenne hva som skjer når de er montert. Men husk sikkerheten må gå først så vær forsiktig.
Føler jeg har bygget en dinosaur når jeg leser denne artikkelen: nrk.no/vitenskap-og-teknologi/1.10901533
På tide med en ny «Bygg din egen» her på «beta»? 🙂
Dette må være en av de hobbyene med den raskeste utviklingen når det gjelder teknologi og utbedrelse de siste årene. Glad jeg er med 🙂
Hei hei!
Noen som har dji Phantom her?
Jeg har fått min og jeg elsker den. Nå skal det sies at jeg er helt ny på flying så jeg er ikke så kravstor. Og vet ikke helt om det kan kalles flying når man flyr denne. Den flyer seg nesten helt selv:) Meeeeen, jeg vil prøve fail safe funksjonen på den nå. Er bare en måte å teste den på med den medfølgende kontrollen. Man må skru av senderen og la quaden fikse seg selv. Men før jeg gjør det vil jeg være sikker på at den faktisk har lagret home position før den tar av. Og da kommer spøsmålet mitt, er det noen måte å se at den har lagret home position? Så det var en kar som lagret posisjenen ved å flippe raskt på venstre bryteren (samme som man gjør på høyre bryteren for å kalibrere). Men han gjorde dette med en annen Naza verson og annen kontroll. Funker det på Phantom også?
Stian
hvordan kan du re sete kk kortet helt jeg har gjort noe feil men jeg vet ikke hva så jeg vil prøve og starte helt på nytt
hvordan kan du re sete kk kortet helt jeg har gjort noe feil men jeg vet ikke hva så jeg vil prøve og starte på starten igjen
Hei, jeg får bare throttle til å fungere.
Når jeg starter den fungerer den med en gang uten at jeg må holde styrespaken nede i et par sek. Den lille LED dioden lyser heller ikke. Er det noen som har noen tips??
Den fungerte som vanlig før men ikke nå
er det noen som har testet denne? er det stor forskjell på størelsen på den dere har bygd her?
dx.com/p/4-axis-hj450-multi-flame-wheel-flame-strong-smooth-kk-mk-mwc-quadcopter-kit-red-black-12448…
Heisan!
Har akkurart fått bygget ferdig en sak basert på denne oppskriften, men med KK Plus kort. Holder på å leke litt på gulvet med den, men tror gyroene underkompenserer der gain er satt nå. Noen som har erfaring med hvilken verdi på roll/pich og yaw det er lurt å begynne med på KK Plus (FM ver 1.5g)?
For inntil ett år siden hadde jeg aldri tatt i en radio fjernstyring, eller i en fjernstyrt fly eller helikopter modell for den del. Men så kom jeg ved en tilfeldighet over NRKbeta`s «Slik bygger du ditt eget quadcopter», og ble bitt av basillen.Her resultatet, så langt:
flickr.com/photos/torst1/8649239958/in/photostream
Her er TBS Discovery fra Blacksheep med NJI Naza og Gps, et selvbygg som jeg stadig prøver ut med et par-tre foskjellige kort og hastighetskontrollere, et Hobbyking x900 Tricopter med KK2 (fantastisk bra), et helikopter jeg kjøpte billig på Jula. Og
IKKE minst, den lille bie fra Benma, som er glimrende til innendørs trening med fjernkontrollen. Anbefales på det sterkeste for de som er nye i fjenstyring, slik som jeg var, og fortsatt er.
Blant radioene en Turnigy 9X og den nyere 9XR. Begge gode og billige alternativer fra Hobbyking. Foreløbig liker jeg den gamle 9X best. Og så gjorde jeg et feilkjøp, tror jeg, på Ebay, en eldre JR XP8103 som jeg strever med å finne ut av.
Selges hvis noen er spesielt interessert.
Hvor dette vil ende vet jeg ikke. Men takk i hvert fall til NRKbeta for å ha sikret meg en aldri kjedelig fritid, nå og i fremtiden.
Intet mindre enn strålende! Takk for at du kommer tilbake hit og deler.
Fin park det der. Det har skjedd mye siden vi skrev disse artiklene, så det er overmodent for en oppdatering. Men det viktigste av nyvinninger har du funnet selv: KK2. Med firmware 1.5 er det et fantastisk fint kort.
Ellers har for min del ringen på en måte blitt fullført. Begynte med quad av tre som vi delte oppskriften på her. Har så vært gjennom aluminium, karbon og glassfiber. Og med den siste riggen min er jeg tilbake til tre igjen:
eirikso.com/2013/03/13/a-simple-to-build-foldable-spider-quad-for-ap-and-fpv/
…et uovertruffent materiale. Stabilt, miljøvennlig, enkelt å jobbe med, billig, litt fleksibelt men ikke for mye og leder ikke strøm eller stopper video/fjernkontrollsignal.
Bare hyggelig !
Og takk selv for hyggelig tilbakemelding.
Etter en lang vinter med innendørs testing og feiling, gleder jeg meg nå til å ta «flåten» utendørs.
Og kjenner jeg meg selv rett så blir din siste rigg mitt neste prosjekt:) Har faktisk de samme esc’ene og koblingsplata på vei i posten.
Fly forsiktig 😀
Drone stuck in the arms of Lady Justice
Officials unable to get lost helicopter
marionstar.com/apps/pbcs.dll/article?AID=2013304300023
Hei!
Jeg lurer på om noen vet hvordan man endrer på sensitiviteten til «Stickene» på Radioen? Jeg vil at ailereon og elevator skal reagere mindre, hvis dere skjønner hve jeg mener. I dette tilfellet gjelder det Turnigy 9x. 😀
Kommer jo an på hvilken radio du har, men som oftest heter det EXPO. Og må justeres opp eller ned. Så får du stikker som er «roligere» i lave nivå.
Tusen Takk 😀
Hei!
Jeg ble så inspirert av denne artikkelen at jeg kastet meg på Quad-bølga!
Nå har jeg satt sammen quaden, og fått motorer og alt til å svive riktig vei. Gyroene fungerer som de skal, så alt ser ut til å fungere flott uten propeller.
Nå har jeg montert propeller, og har hatt et par test turer. Det viser seg at jeg har to problemer:
1. Propell 1 gir svært mye kraft når jeg har throddle lav, også kommer de andre propellene etter når jeg øker throddle. Veldig rart! :-/
2. Får ikke quaden til å hovre. Når jeg får den opp i lufta, har propellene stabilisert hastigheten i forhold til hverandre, men den skal alltid dra litt ekstra frem mot høyre. Har prøvd å trimme stickene på radioen (Turginy 9x), men klarer ikke å få den til å ligge i luften uten å dra en eller annen vei. Dette gjør det selvsagt svært vanskelig å styre den.
Ettersom det kan virke som at gyroene ikke reagerer skikkelig, slik at de ville rettet opp den slags svigninger, har jeg prøvd å stille «Roll» opp mer og mer. Men dette fører bare til kraftigere svinging i en eller annen retning.
Noen som har noen gode tips og dele? 🙂
Info:
Kort – KK fra hobbyking
Kjører med firmware XCopter V4.7 by kapteinkuk
Radio – Turginy 9X 9CH
Ellers mye likt med artikkelen 🙂
Først:
Starte på Quad-bølga var nok en stor tabbe!
Fra nå av vil du bruk flere tusen kroner på hobbyen! 😛
Vi får alle holde Eirik Solheim ansvarlig for økonomien.
Uansett, så anbefaler jeg deg disse 2 norske multicopter forumene:
http://fpv.no
modellflynytt.no/forum137.html
Der får du raskere hjelp enn fra et kommentarfelt som er litt gammelt.
Supert, takk skal du ha 🙂
hei Morten!
hvad for speedcontroller har du?prøv å få oppdatert firmware til Simonk da dette fungerer mye bedre på multirotor!!disse fungerer bra etter oppdatering til simonk og er veldig billige!!Hobby King 30A ESC 3A UBEC
Hei
Har lyst til å bygge eget og synes denne oppskriften virker som noe til og med jeg kan følge! Men er den for gammel? Finnes det nyere byggeblogger på noenlunde samme nivå som en nybegynner kan følge?
Den er gammel, men duger ennå. Vi har planer om en skikkelig oppdatering, men enn så lange er dette det viktigste nytt:
1. Kjøp KK2-kortet på HobbyKing. Har LCD og er MYE mer brukervennlig. Koster 30,- dollar
2. Kjøp Multistar-ESC’er i stedet for Turnigy Plush. Også fra HobbyKing.
Takk for svar!
Et spm til: Synes frakten på propellene fra mikrokopter var litt høy. Er det stor forskjell på kvalitet på propeller? Finnes en hel del på ebay ser jeg (ebay.com/sch/i.html?_odkw=Propeller&_osacat=34056&_from=R40&_trksid=p2045573.m570.l13…)
Jeg har satt sammen et helikopter etter oppskriften deres og er helt fersk i gamet. Har HobbyKing Multi-Rotor Control Board V2.1 flashet til 4.7 X modus.
Har hatt litt trøbbel med både aktivering og synkronisering, men ser ut til å ha fått dreisen på det nå.
Men da dukket det opp et nytt problem. Kopteret vil dra mot høyre, mye mer enn jeg får justert med trimmingen. Så da fikk jeg reversert roll gyroen, og da drar den heller mot venstre!? Pitch ok, og yaw er litt vanskelig å si siden den trekker sånn mot siden.. noen tips?
jeg fikk det aldri til med dette kortet, og med mindre du er en som elsker utfordringer, så har jeg et soleklart råd, kjøp KK2.0 korter, og gjerne flash det med siste firmware. Det er 100 ganger bedre, og mengder med set up på youtube.
Jeg flashet kortet og begynte helt på nytt med oppsettet i dag. Er nå kvitt det forrige problemet, nå virker alt som det skal, bortsett fra at èn motor er svakere enn de tre andre..
Husker å ha lest om andre som har hatt det problemet her så da er det bare å tråle gjennom kommentarene her igjen.
Har bestilt kk2, men har lyst til å få denne quaden i lufta så fort som mulig..
Da har jeg gitt meg. Fant det artigere å bygge enn å fly. Så om noen vil overta… finn kode: 42842318
Så kjedelig da.. 🙂
Har du fått testet FPV? Det er iallefall veldig mye artigere enn vanlig LOS (Line of Sight)-flyging..
Først og fremst, takk for informativ guide, NRKbeta!
Jeg og guttungen bygde ferdig vårt første quadcopter delvis etter denne guiden, og det gikk overraskende greit: youtu.be/AePiQDEHs54
Her er noen anmerkninger:
– iMAX B6AC fra Dealextreme var søppel. Først røk det innebygde 240V poweret, så voltage error og breakdown. Søppel.
– Servokabler stod ikke på delelista, så dette måtte vi etterbestille fra smallsize.no.
– Vi bestilte og det «gamle KK-kortet» Control Board V2.1 (Atmega168PA), uvitende om at KK2.0 nå er lansert, og at dette skal være bedre/enklere. Dette er nå bestil fra Hobbyking. Kom heldigvis rett under tollgrensen(NOK197,–)
Vi fikk kjørt utendørs i 10 minutter før vi fikk problemer med kontakten med kontrollkortet. Etter armering falt det ut igjen etter noen sekunder, og nå får vi ikke armert i det hele tatt. Har lest forumer og prøvd det meste uten hell. Binding på nytt, justering av endpoint, reversering, trimming osv.
LED på kortet lyser når vi setter på strøm så jeg tror den leser firmware. Vi får liv i kopteret ved ESC throttle range: yaw-pot til 0, full throttle ved påslag av kortet.
Jeg må nesten fraråde å gjøre dette på spisebordet, med propeller på. Det holdt på å gå riktig galt…
Er det noen som har et tips til oss newbies ang dette? De to ukene vi må vente på det nye kontrollkortet kan bli lange, i hvertfall for junior.
[oppdatering]
Som tidligere nevnt så fikk vi store problemer med å armere KK-kortet. Det viste seg at pot for rudder på radioen (Turnigy 9X) hadde sluttet helt å respondere, og det var heldigvis bare en dårlig lodding som var
Etter å ha loddet på nytt, byttet ut den defekte iMAX B6AC-laderen fra DealExtreme med en ekte iMAX og byttet fra KK v.2.1 til KK2.0 er vi endelig i lufta!
Hei, Jeg er snart 14 år og har nå bygd hele rammen og jeg har bestilt alle delene. Men jeg lurer på to ting:
1. hvor lenge tar det før tingene kommer fra hobbyking? jeg bestillte bare fra internasjonal warehouse altså hong kong og tokk den billigste frakte metoden.
2. ca hvor stort er kk-kontroller kortet? siden jeg vet ikke om den passer inni salatboksen jeg har funnet.
Tar vel fra 6 dager til 30 om du velger den billigste alternativet.
Størrelsen er vel rundt 40mm x 40mm (4cm altså). ca.
Både KK v.2.1 og KK2.0-kortet måler 50 x 50 mm.
Ventetid på varer fra Hobbyking virker alltid som en liten evighet, men varierer stort. Slik er det å handle billig fra østen.
Lykke til med prosjektet! Moro å bygge quadkopter.
1 ting til:
ca hvor lang tid er flytiden med 2200mAh og 15x15mm furulister?
forresten takk for svar:)
Kommer an på totalvekten på helikopteret.
Helt enkelt oppsett (dvs ca det samme utstyret som det er i artikelen her), så kan du nok forvente deg rundt 5-10minutter flytid +-.
Har selv bestillt et 10900mAh batteri til mitt helikopter.. Men det veier en god del mer .. 🙂
Kan jeg bestille et mye større batteri som 5000mAh vil det lønne seg eller blir det for mye vekt?
Her er også en gjennomgang av KK brettet med LCD. youtube.com/watch?v=lRbAqH-zjVs
Jomfruturen med quadkopteret gikk over all forventning! Takk for detaljert og godt forklart byggeblogg! 🙂
Eneste nedturen så langt er at det ene lipo-batteriet er dødt… Tålmodigheten for å vente på lading av batteri er ikke til stede…
Hei , er akkuratt ferdig med å bygge mitt quadcopter. Det jeg lurer på er , hvor stabilt skal copteret være i luften ? skal jeg kunne bare gi gass , så ligger det stabilt i luften ?.
Copteret mitt heller til en side , å jeg får det ikke til å bli stabilt, virker som gyroene ikkje gjør en god nok jobb ..
Hei, jeg har litt tidligere erfaring fra RC, og nå tenkte jeg å prøve meg på quadcopter! Har laget en liten liste med deler jeg trenger. Det som er viktig for meg er at det skal være noenlunde lett å fly, lett å reparere og stabilt/kraftig nok for å filme med et kompakt(undervanns)kamera.
Her er listen min som jeg har laget etter litt inspirasjon fra NRK beta. Kom veldig gjerne med modifiseringer, men prøv å ikke gjøre det så myye dyrere:
Ramme (f450)
ebay.com/itm/F450-Multi-Copter-Quadcopter-Rack-Kit-Frame-QuadX-Quad-KK-MK-MWC-TN2F-/271331664556?pt=…
—
Styringsbrett
hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=19534
—
ESC x4
hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=2163
—
Prop Savers
hobbyking.com/hobbycity/store/uh_viewItem.asp?idProduct=8240
—
Motor (800 kv) x4
hobbyking.com/hobbyking/store/__8622__2213N_800Kv_Brushless_Motor.html
—
5 servokabler (skal skjøtes) x2
ebay.com/itm/5X-150mm-RC-Servo-Extension-Cord-Cable-Wire-Lead-for-RC-Car-Helicopter-R1BO-/1309281082…
—
4 par 10.45-propeller x2
http://www.ebay.com/itm/4pairs-10×4-5-1045L-R-CW-CCW-Carbon-Nylon-Propeller-Multi-Copter-quad-Copter/300861659986?rt=nc&_trksid=p2047675.m1851&_trkparms=aid%3D222002%26algo%3DSIC.FIT%26ao%3D1%26asc%3D261%26meid%3D3746830733880322469%26pid%3D100005%26prg%3D1088%26rk%3D3%26rkt%3D5%26sd%3D221316885212%26
—
Har batterier og sender/mottager
Dette kommer på ca. 850 kr til sammen uten frakt
Ville som sagt satt stooor pris på det om noen ville kommentere listen 😀
Styringsbrett…nei,nei,nei.. legg på 15 dollar og kjøp dette, det vil du ikke angre på:
hobbyking.com/hobbyking/store/__49254__Hobbyking_KK2_1_Multi_rotor_LCD_Flight_Control_Board_With_605…
Har så vidt vurdert det, men vil det fungere med min 4 kanals kontroll? Det står jo 5 cm input from reciver.. Hva brukes den siste kanalen til?
Jeg også begynte med dette, og flere andre lignede «billige» brett. Men fikk det aldri til å funke.
Først når jeg kjøpte KK2.0, nå nyere versjon KK2.1, fikk jeg fart på sakene. En annen ting er at blir du først grepet av denne hobbyen så vil du raskt videre. Så nå flyr jeg en TBS Discovery med GSP og brushless gibal for filming fra lufta.
Så jeg vil sterkt anbefale KK2.1, også fordi det finnes massevis av setup guides på You Tube, som vil få deg raskt i lufta. På KK2.1 brukes kanal 5 først og fremst til å aktivere self-level. Du kan fly med self-level off, men med on er det en drøm å fly, så jeg vil anbefale at du kjøper en 8 kanals radio. Jeg har både Turnigy 9x og 9xr. Begge til vel 50 usd på Hobbyking, og begge veldig bra. Også her massevis av hjelp med oppsett på You Tube. Og som sagt, du vil helt sikkert ganske fort videre, og da er 8 kanals radio uungåelig. For eksempel til å aktivere lys, fotografering, og andre morsomme ting.
Angående prop savers så brukte jeg også disse gummi ringene i begynnelsen, men fant fort ut at de var noe herk, så jeg vil anbefale disse 3mm som passer til motorene du nevner
banggood.com/Emax-3mm-Propeller-Adapter-For-BL2205-BL2210-BL2215-Motor-p-74419.html
Jeg kjøper en god del fra Banggood, de har fri frakt.
Er det noe mer så bare spør:)
Har et bygget et quadcopter etter guiden her, og alt av motorer osv fungerer fint å starter samtidig, men når jeg gir throttle drar quaden seg mot venstre mer en jeg kan kompensere for . Noen som har et tips til å fikse dette problemet?
[…] på NRKbeta hadde vi i 2011 en artikkelserie (Del 1 & Del 2) om hvordan du kan bygge ditt eget […]