I sommervarmen kan det være vanskelig å finne på noe fornuftig, så hvorfor ikke bygge sin egen mini-ubåt eller drømme om å gjøre det?
Det har blitt stadig enklere og billigere å bygge eller kjøpe en undervannsdrone, eller ROV (Remotely Operated Vehicle) om man foretrekker den forkortelsen.
Med dem kan du undersøke livet under vannflaten, enten som hobbyist eller som en del av jobben, uten å bli våt bak øra.
Vi i NRKbeta er blant noen av dem som tidligere har eksperimentert med OpenROV, et selvbyggersett som tar rundt to til tre dager å sette sammen.
Vår ubåt, kalt U-1337, ble med til Saltstraumen minutt for minutt:

Der bidro den med vakre bilder fra en av verdens sterkeste tidevannsstrømmer:

Bygg din egen helt fra bunnen av
Da vi kjøpte U-1337 i 2016 kostet den 1 400 dollar og alle deler kom ferdig laserskåret og klar til å settes sammen.
For dem som ønsker å lære noe nytt og få tak i en ROV enda billigere finnes det nå eduROV, et prosjekt basert på åpen kildekode og deler man kan kjøpe på internett til rundt 3 800 kroner.
Prosjektet har hatt ulike hovedbidragsytere, men det er Kristoffer Slåttsveen og Martin Løland som har tatt prosjektet gjennom den siste fasen.
Å bygge sin egen undervannsdrone helt fra bunnen av er noe som krever enn viss teknisk forståelse. Man bør også ha tilgang til loddebolt, en rimelig 3D-printer, og et enkelt verktøysett.
Når det er sagt finnes det en rekke tekniske verksted som er åpne for privatpersoner og man kan bestille 3D-printede deler gjennom for eksempel 3D Hubs eller oppsøke norsk nettforum for 3D-printing.
Alle deler finner du her og en trinnvis guide finner du her. Om du er i tvil om dette er noe for deg, eller vil lære hva en undervannsdrone består av bør du følge med videre.
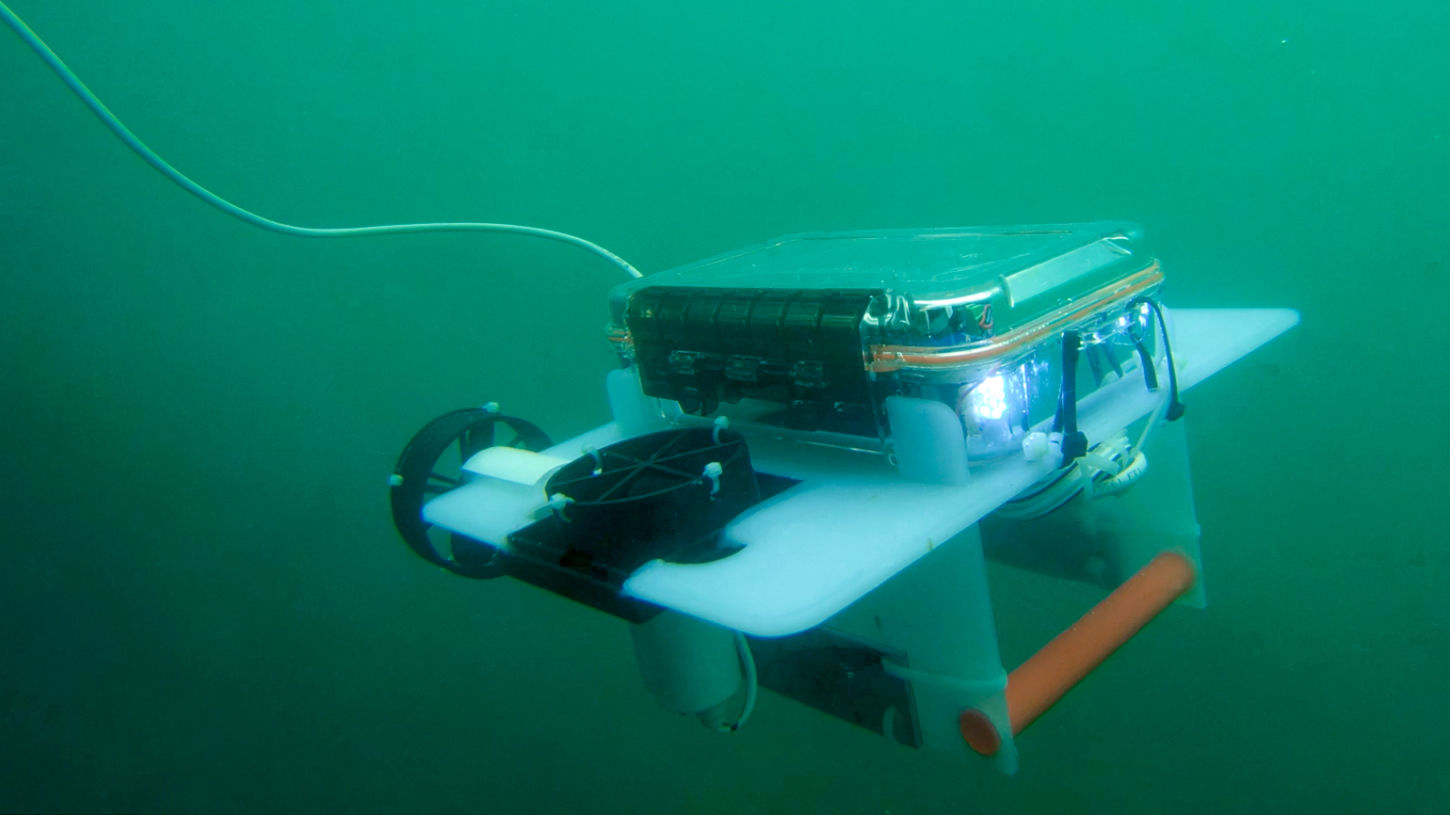
Hva består en undervannsdrone av?
Før vi knekker i gang med de viktigste stegene for å lage en selv kan det være greit å vite hva en ROV typisk består av.
Alle ROV-er har et vanntett skall som holder elektronikken tørr. For å styre farkosten trenger man propeller (helst fire stykker eller fler) og noen «vinger» til å holde den rett.
Elektronikken består i dette tilfellet av to små datamaskiner (Raspberry Pi og Arduino Micro) som styrer farkostens motorer, sensorer, og kamera.
I tillegg kommer det et hovedkort som fordeler strøm og videreformidler kommunikasjonen til de ulike komponentene.
Selv står du på land med en bærbar datamaskin som kommuniserer med undervannsdronen via en kabel. Hvorfor kabel? Fordi trådløs kommunikasjon under vann er vanskelig.
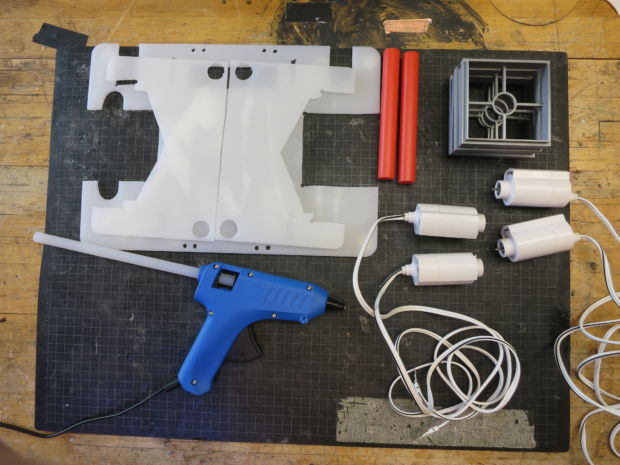
Først: Lag skallet!
Alle som har vært borti elektronikk vet at det ikke liker vann. Derfor er det viktig å finne materialer som er vanntette.
Det beskyttende skallet er en vanntett boks man for eksempel kan kjøpe på en jernvarebutikk. Slåttsveen har så valgt å benytte skjærefjøler av plast (tre stykker), plastrør, og hurtigtørkende lim.
Ved jevne mellomrom kan man sjekke om skallet er tett ved å benytte en rimelig vakuumpumpe (kalles også sugepumpe) i hullene man bruker til kabler, men som man etter hvert tetter igjen med lim. Er skallet tett vil man få et undertrykk.
Fra modell til ferdig montert propell:
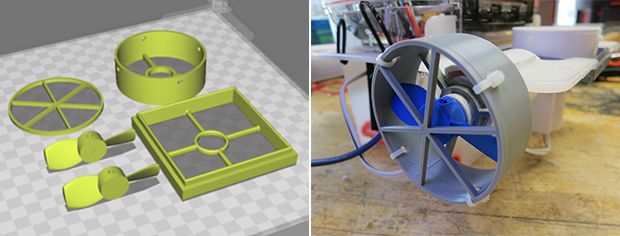
På NRKbetas Lulzbot-printer ville det for eksempel ta i underkant av syv timer å printe alle delene.
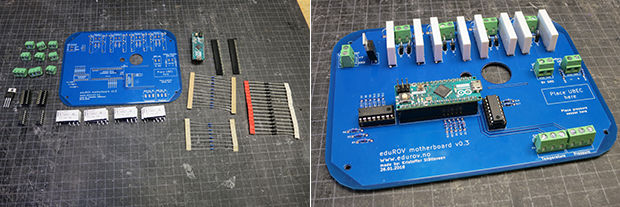
Elektronikk
For noen er dette en av de vanskeligere partiene. Alle de ulike elektriske komponentene må kobles sammen, og her må man gjøre litt av arbeidet selv.
Selve kretskortet kan du enten bestille eller lage selv, men å feste alle de små komponentene med metall (lodding) må man gjøre selv. Det finnes flere guider og videoer (YouTube) som forklarer fremgangsmåten og ting å tenke på.
I dette tilfellet må man bare følge en tegnforklaringen:
Har man gjort alt rett så langt er det bare å trekke kablene, fylle på med masse hurtigtørkende lim, og sjekke at det er tett.
Programvare
Til slutt må man sette opp alle datamaskinene slik at de gjør sin egen oppgave og klarer å kommunisere sammen.
Først har du din egen bærbare datamaskin som snakket til farkosten. Den kommuniserer med hjernen i dronen, en Raspberry Pi, som snakket til kameraet og styrer det som kalles en Arduino.
Sistnevnte brukes mye til å lese av og styre sensorer og motorer. Det gjør Arduinoen også på dette prosjektet.
Dronen har blant annet sensorer for trykk (sier noe om dybde), temperatur, akselerasjon, og orientering i vannet.
Det er også Arduinoen som i siste rekke styrer motorene og bestemmer om lysene skal være på.
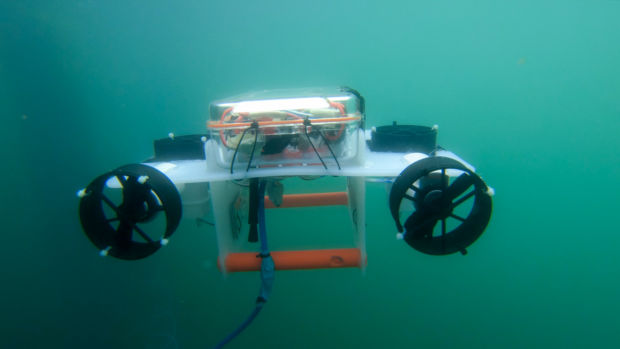
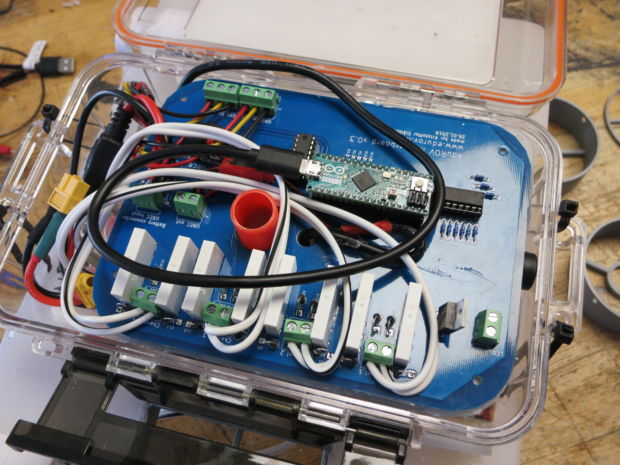
Slik ser det ut til slutt:

Hva om du ikke vil bygge selv?
Om du ikke orker tanken på alt arbeidet som ligger bak å lage noe eget finnes det er rekke ferdiglagde undervannsdroner på markedet.
Hovedregelen her er som med all annen elektronikk: Pris og kvalitet henger noenlunde sammen.
Da vi ikke har gjort noen produkttester selv vil jeg anbefale å benytte en av mange sammenlikningssider for droner.
Blant annet har Hobby Review en gjennomgang av de beste tilgjengelige dronene på markedet.
Sverger du til et norsk alternativ forteller Blueye Robotics, til Shifter, at drone deres kommer ut i løpet av høsten.
Kjenner du til et annet prosjekt i samme gate vi burde skrive om? Tips meg gjerne i kommentarfeltet eller fyr av en såkalt epost.
***
Vi har tidligere skrevet om artige byggeprosjekter av ulik vanskelighetsgrad. Blant annet skrev Eirik i fjor om hvordan han satt sammen sin egen elsykkel.
Det er også lov å gjøre den avlagte kontormaskinen en spillmaskin for Fortnite.
Hei!
Hvor dypt kan man kjøre disse farkostene? Hvis man er enda mer interessert i ROV og AOV, og tar en master eller doktorgrad i biologi, så kan faget «Underwater robotics and the polar night» (på UNIS – Universitetsenteret på Svalbard) anbefales!
Hei!
Utfra mine samtaler med dem forstod jeg det slik at bregrensningene kommer av to faktorer:
1) Hvor tett boksen er: Dypere gir høyere trykk. De testen sin til å klare i hvert fall åtte meter.
2) Det er også noen begrensninger på hvor lang kabelen til overflaten kan være. De prøvde med 20 meter (om jeg husker rett) og det gikk helt fint.
Det ser ut til at det er vanlig ethernet som er forbindelsen mellom ROV og PC så da der det vel 100 meter som er teoretisk maksbegrensning på kabellengde (dog kan det være at man bør holde seg litt i underkant av det for å være på den sikre siden.
TP Ethernet kabel kan man nok i teorien ha over 100 meter, men så lang hale vil også medføre en del «drag» og gjøre ROVen vanskeligere å manøvrere.
Ved store dyp er det også begrenset med lys, slik at det må legges til hensiktsmessige lyskilder. Grunnet begrenset naturlig lys, er det ved og ikke så spennende vegetasjon.
Om målet er å utforske båtvrak, eller naturformasjoner, er den største utfordringen at medbragt lys helst funker for macro og ikke oversiktsbilder.
Cool. Men:
«Sverger du til et norsk alternativ forteller Blueye Robotics, til Shifter, at dere drone kommer ut i løpet av høsten.»
Har korrekturleseretatt ferie?
Veit du hva, det har de faktisk! Retter opp nå
Herlig! Nå venter jeg bare spent på en artikkel om flyvende droner!
😀
Si gjerne ifra om dere kjøpte en haug med PCBer og har noen til overs! 🙂
Jeg har noen liggende nå 🙂