En av de største utfordringene med bruk av droner er at de rett og slett krasjer i omgivelsene rundt seg.
Det være seg trær, bygninger, mennesker eller andre fly i luften.
Av og til kan dette skyldes elektroniske eller mekaniske feil, men i de aller fleste tilfeller er det på grunn av det vi ofte kaller menneskelig svikt, eller beint fram for dårlige ferdigheter hos piloten som fører dronen.
Noe av det som det jobbes svært mye med i forskningsmiljøene for øyeblikket, er det som på godt engelsk kalles «obstacle avoidance» – teknologi som gjør at dronene selv ser hindringer foran seg og unngår disse.

I en nylig utgitt artikkel (abstract) viser PhD-student Andrew Barry og hans professor, Russ Tedrake, som begge holder hus ved MiTs Computer Science and Artificial Intelligence Lab (CSAIL), fram et system som gjør en drone i stand til å lese terrenget foran seg og unngå hindringer som måtte dukke opp.
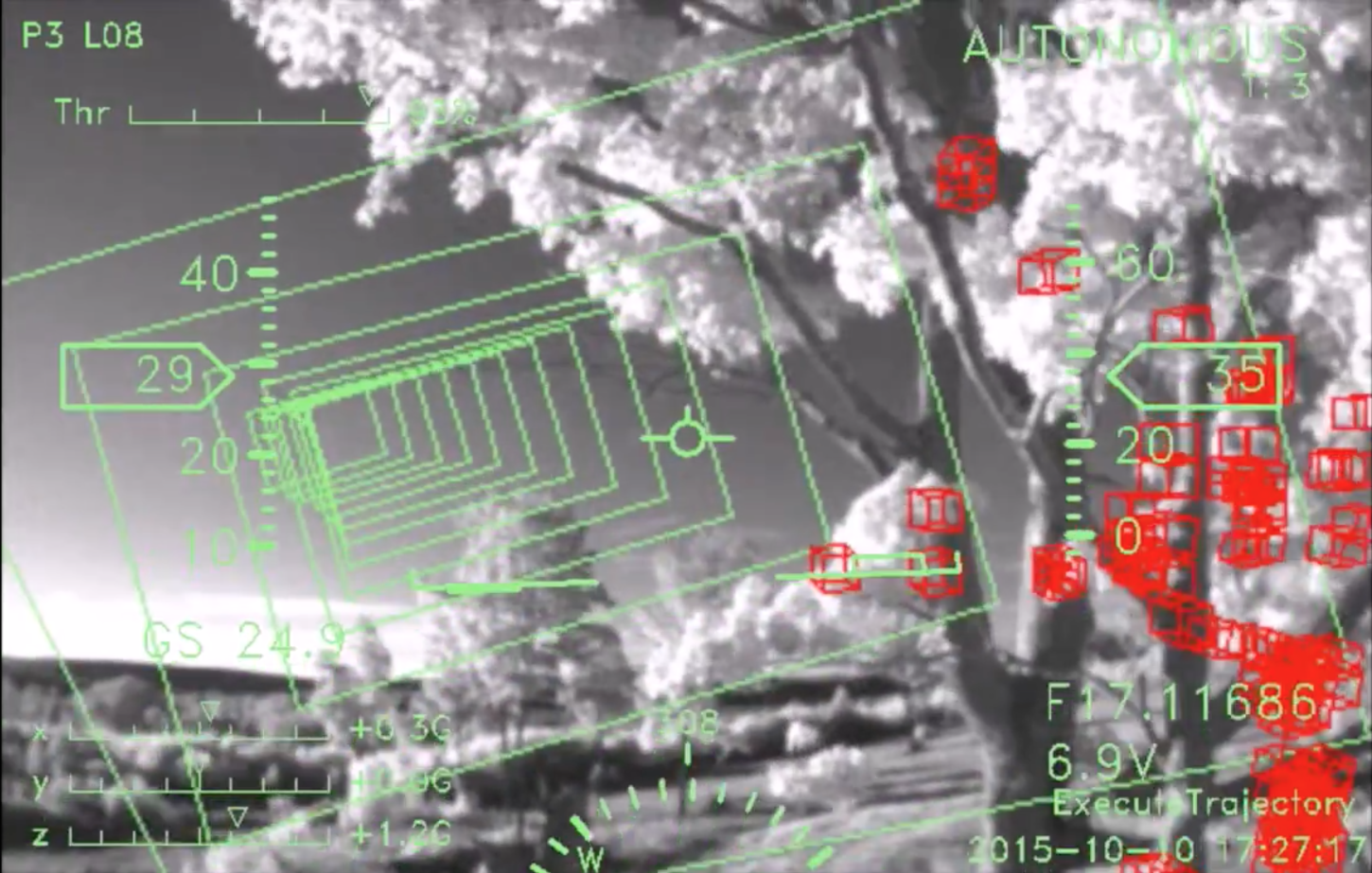
I en video publisert av CSAIL vises systemet mens det testes ute i felten.
Dronen, som er et selvbygd isopor-fly utstyrt med elektroniske komponenter som er standard hyllevare, koster ca 15 000 kroner og har et kamera på hver vinge.
Bildene fra disse kameraene analyseres så av en datamaskin ombord i flyet, og denne avgjør hvor langt unna gjenstandene som dukker opp foran flyet er, og hvordan man best mulig kan navigere unna dem.

Programvaren som analyserer bildene fra flyet er Open Source, og kan analysere 120 bilder i sekundet. Programvaren bruker 8.3 millisekunder pr bilde, noe som er 20 ganger raskere enn eksisterende programvare for samme formål.
Utvikling av droner, og ikke minst sikkerhetssystemer som dette går i svært rask utvikling, noe som kommer godt med hvis utbredelsen av både kommersielle og hobbydroner fortsetter i samme takt som den har gjort de siste årene.
Hvor mange av NRKbetas lesere har på et eller annet tidspunkt krasjet med dronen sin? Opp med hånda! (Vi hører gjerne bortforklaringen din på hvorfor akkurat du ikke gjorde noe galt også 😉 )
(via Roboticstrends.com)
Artig utvikling dette, og spesielt nyttig for nybegynnere.
*Rekker opp hånda* – Joda jeg har krasjet. Første gang med en Phantom 1. Det var min første quad, og jeg var dessverre ikke godt nok kjent med funksjonene på denne. Jeg fløy litt for langt vekk, og fikk problemer med å se hva som var bak frem, og visste ikke om funksjonene for å få den tilbake. Det ble en «kontrollert» krasj i skogen så den ikke skulle stikke videre og noen timers leting.
Nå har jeg Phantom 2 Vision, og kan alle funksjonene. Har ikke krasjet med denne, men fikk en flyaway som kan skje med disse dronene. Manuell modus hjalp ikke, så jeg måtte skru av kontrolleren. Da vil den prøve å komme tilbake om du har vært tolmodig med å vente på godt GPS-signal før du tok av. Jeg avskrev meg fort denne quaden siden den forsvant langt ute av rekkevidde, men plutselig kom den hjem og landet pent ved beina mine med 3 minutters batteritid igjen.
Flyr denne fremdeles i dag, i tillegg til en selvbygget quad.
Tips: Vent alltid på godt GPS-signal. 6 satelitter er minimum, men jeg flyr ikke uten minst 8 satelitter. Les brukerhåndboka og gjør deg godt kjent med fartøyet ditt. Se mange videoer på Youtube for å lære mest mulig. Merk drona med navn og telefonnummer. Krasjer den eller lander pent en plass, så kanskje du er heldig og noen finner den. Da er det greit om eieren er kjent.
Der er nå slikt at alle som holder på med noe radiostyrt i luften vil én eller annen gang krasje.
Det er nok mest sannsynlig å gjøre dette med vanlig helikopter, men det betyr ikke at fly og quad piloter ikke også krasjer.
Hva jeg mener du ikke helt gjorde rett var å hoppe direkte på en phantom.
Det er jo sterkt å anbefale å lære seg å fly en Hubsan x4 (uten kamera) før man går for noe større.
Mindre sjanse for å gjøre skader på objekter, og personer, samt at den tåler mer, og en totalkrasj er billig.
Når man klarer å orientere seg, og å fly med quaden orientert i alle fire retningene, da er man klar til å oppgradere.
Å gjøre det før, er en bjørnetjeneste 😉
Det kan jeg ikke protestere på. Jeg hadde flydd litt tidligere med en liten hubsanlignende sak, men hoppet litt vel fort over til Phantom. Den aller største feilen mener jeg var at jeg ikke tok meg god nok tid til å lære meg den å kjenne. Men gjort er gjort, så nå håper jeg andre lærer av mine feil hehe.
AI er fremtiden! Skru av hjernen, og konverter gjerne, for nå slipper vi å tenke mer!
Det neste blir nok kunstig intellekt, der datamaskiner vil bedrive kunstkritikk basert på hvorvidt kunstverket gir de riktige vibbene om kjønnsidentitet, patriarkiet, kapitalismen, snuten, m.m. Utopia er rett rundt hjørnet, dere!
Hehe, skal nok få lov til å tenke, men det er fare for datamaskinene gjør det raskere. Og bra er det, er det en ting jeg ikke stoler på så er det generelle menneskets beregning. Men hvordan den AI’en ser ut i framtiden, håper jeg vil være det beste fra mennesket og litt til, og omvendt.