Du har fått litt bakgrunn og er ferdig med byggetrinn 1. Så nå er det på tide å få quadkopteret i luften.
Vi fortsetter i kjent NRKbeta-stil og kommer til å oppdatere denne artikkelen også etter hvert som dere hjelper oss å samle erfaring.

Om du har fulgt vår byggelogg har du nå et quadkopter med ramme av furu og kryssfiner, understell av isopor eller kleshengere, fire motorer, fire hastighetskontrollere, KK-kontroller, batteri og batterialarm.

Motorene er koblet til sukkerbiter som igjen er koblet til hastighetskontrollerne. De er igjen koblet i hver sin sukkerbit med en svart leding for minus og en rød ledning for pluss. Men der stopper det.
Nå skal du koble alt sammen og konfigurere det hele. Først lager vi strømfordeling. Det du skal gjøre er ikke spesielt komplisert. Du skal koble sammen fire svarte ledninger og fire røde ledninger. Ledningene skal ut fra sukkerbitene på hver arm og samles bak på quadcopteret. Her får du bare måle til for hånd og bestemme selv hvordan du vil legge dem langs kroppen på farkosten. Det skal gå ganske mye strøm gjennom disse ledningene. Og de er koblet direkte til et batteri som kan levere store mengder energi på kort tid. Så her bør du gjøre ting litt skikkelig. Skru til sukkerbitene ordentlig og vær nøye med at du ikke tar av for mye isolasjon. Kortslutning kan føre til gnister, flammer og et batteri som til slutt kan eksplodere.

Du kan velge selv om du vil trekke alle ledningene frem og lodde dem sammen, eller koble dem sammen med andre metoder. Vi prøver som nevnt tidligere å gjøre dette nybegynnervennlig, så vårt forslag er å koble sammen med Wago-klemmer.

De kommer i varianter med fem koblingspunkt. Det er akkurat det du trenger. Fire ledninger inn og en ut. Vi kjøpte våre hos Clas Ohlson.
Om du vil lodde ledningene sammen anbefaler vi at du følger metoden til David Windestål. Tvinne sammen, forsterke med ekstra ledning og fylle på med loddetinn.
 (Bilde: David Windestål)
(Bilde: David Windestål)
Du kan se bilder i hans byggelogg for Trikopter.
Nå har du et quadkopter med motor ytterst, sukkerbit med tre koblinger, hastighetskontroller, sukkerbit med to koblinger og så ledninger som samles sammen til fire svarte og fire rød i hver sin Wago.

Og om du syntes bildet over viser noe som ikke er identisk med det du nettop har bygget har det sin naturlige forklaring: For å samle mest mulig erfaring som vi kan dele har NRKbeta-redaksjonen valgt litt forskjellige tilnærminger. Farkostene på bildet har lengre armer og større kryssfinerplate i midten.
Fra de to Wago-klemmene skal det nå en svart ledning til minus på batteriet og en rød ledning til pluss på batteriet.
Batterier og lading
Først må vi nok en gang nevne at batteriene er meget kraftige. Kortslutning kan være direkte farlig og du må aldri lade dem uten tilsyn. De skal ligge på et underlag som ikke er brennbart når de lades.
LiPo-batterier bør aldri tømmes helt. Og du bør bruke en balansert lader som holder øye med hver enkelt av de tre cellene i batteripakken.
Batteriet har et hovedutak og et balanseringsutak.

Batterier kommer med forskjellige hovedplugger. Eller helt uten plugger. Så her må du enten velge å standardisere på en type batteri og sette på tilsvarende plugg på quadkopteret ditt. Eller så må du standardisere på en type plugg å vite at det første du må gjøre når du kjøper et nytt batteri er å sette på ny plugg.
Vi har gjort det siste. Og valgt XT60. Du skal uansett ha en hann-plugg på selve farkosten og hunn-plugger på batteriene.
For å lage hann-tilkoblingen på quadkopteret trenger du altså en hann-plugg og to ledninger som er lange nok til å ta deg fra Wago-klemmen til et sted under/bakpå rammen. Lodd pluss til den røde ledningen og minus til den svarte.
Du kan eventuelt kjøpe en ferdig loddet plugg. Om du har bestemt deg for XT60 finner du en ferdig sak her: XT60 Male w/ 12AWG Silicon Wire 10cm (5pcs/bag)
Om du har kjøpt batteriene fra DealExtreme som vi linket til i handlelisten vår kommer de med den nå litt gammeldagse T-pluggen.

Det første du må gjøre med batteriet er da å bytte til XT60. (Eller legge på litt ekstra i porto og heller bestille batteriet ferdig med XT60 fra HobbyKing.)
Når du setter på ny plugg på batteriet er det viktig å lodde skikkelig og for all del unngå kortslutning. IKKE klipp av begge ledningene samtidig! Klipp av den ene, lodd den på XT60, legg på godt med isoleringstape og begynn så på den andre.
Batteriladeren fra DealExtreme kommer også med de gamle T-koblingene.

Så her må du selv lage en overgang slik at du kan lade XT60. Du skal ha en hann-plugg på laderen. Koble sammen en XT60 med to banan-plugger. Pluss til en rød plugg og minus til en svart plugg.
Når du skal lade batteriet kobler du den hvite balanseringspluggen til riktig kontakt på laderen. Så setter du i selve hovedkabelen i bananplugg-uttaket.

Du må ALDRI sette batteriet i den lille bananpluggovergangen med bananpluggene hengende fritt. Da er faren for kortslutning stor. Sett bananpluggene i laderen først. Så kobler du til batteriet.

På laderen kjører vi med følgende oppsett når vi har god tid: «Program select: LiPo Batt», funksjon: LiPo Balance, 1.0 A, 3S 11,1V. Når vi har litt dårligere tid kjører vi LiPo Charge, 2.0 A.
Og her tar vi gjerne innspill fra ekspertene der ute. Laderen kan kjøre på med alt fra 0,1A til 5A. Hva er det optimale for batteriene vi benytter her? Hvor ofte bør vi kjøre «balance» og når kan vi kjøre vanlig «charge»?
Styring
Da har du fått på plass strømmen. Nå er det selve styringen som skal kobles.
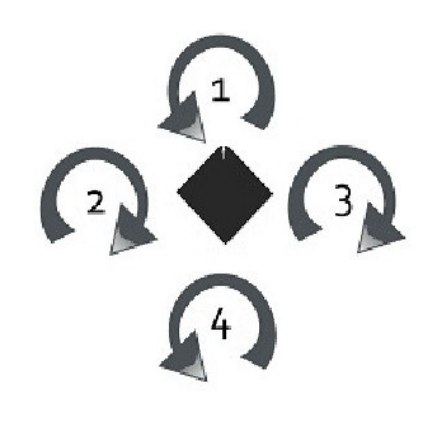
Når du skal fly i såkalt pluss-modus peker en av motorene mot fronten, en bakover, en mot høyre og en mot venstre.
Styringen gjøres ved å variere hastigheten på motorene. Retningene i luften beskrives med forskjellige begreper. Avhengig av om du flyr helikopter eller fly, snakker norsk eller engelsk. Kort fortalt handler det om å bevege quadkopteret opp og ned, frem og tilbake, mot høyre og venstre og kunne rotere det rundt sin egen akse.

Når du skal koble delene sammen kommer du borti begrepene som brukes for å beskrive bevegelsene. På tegningen over har vi prøvd å vise hva de betyr. Her er en forklaring:
Throttle
Dette er på en måte gasspedalen. Den gir fart på alle motorene og tar quadkopteret opp og ned.
Elevator
Denne beveger helikopteret fremover og bakover. Kalles også «pitch». Styrer hastigheten på motorene foran og bak på farkosten. Trekker du spaken fremover vil du få mer fart på bakre motor og mindre på fremre. Quadkopteret legger seg så fremover og skyter fart.
Aileron
Beveger quadkopteret mot høyre og venstre. Kalles også «roll». Trekker du spaken mot høyre vil du få mer fart på motoren på venstre side og mindre på høyre side. Da vil quadkopteret legge seg over og kjøre mot høyre.
Rudder
Lar quadkopteret rotere rundt sin egen akse. Kalles også «yaw». På quadkopteret går to av propellene med klokken og to mot klokken. For å få farkosten til å kunne rotere rundt sin egen akse justeres hastigheten på de to parene i forhold til hverandre.
På fjernkontrollen styres disse fire parametrene slik:

..dersom du har en fjernkontroll i det som kalles «modus 2», som er det absolutt mest vanlige i vår del av verden.

Det er mottakeren som hører til fjernkontrollen som kobles til KK-kortet. Der må du sette riktig kanal på riktig kontakt. På kortet er det fire kontakter som heter «Ail», «Ele», «Thr» og «Rudd». Du må finne ut hvilken kanal som passer til hvilken funksjon. På Futaba og Turnigy er det følgende:
1 = Ail (Aileron)
2 = Ele (Elevator)
3 = Thr (Throttle)
4 = Rudd (Rudder)

De tre kontaktene er minus, pluss og signal.

Minus er den kontakten som er ut mot yttersiden av kortet (som oftest svart eller brun ledning). Pluss er i midten (som oftest rød ledning) og signal er inn mot kortet (som oftest hvit eller oransje ledning).

Kablene du trenger mellom mottaker og kort er hun-hun. Vi fikk ikke tak i dem ferdig og loddet selv. Vi kjøpte rett og slett forlengelsesledninger som er han-hun. Klippet dem over og loddet sammen de fire hun-hun-ledningene vi trengte.

Du får også tak i kontaktene for å lage ledningene selv hos for eksempel Smallsize.
Koble til motorene
Ut fra hastighetskontrollerne kommer det en flatkabel med tre ledere i tillegg til strømkablene. Disse skal kobles til kontrollerkortet. Motorkontaktene på kortet er merket med M1 til M6.
NB! Om motorer og retning
Hvilken retning motorene skal gå er avhengig av hvilken programvare du har på kortet. Her er det litt forvirring, og det er ikke godt å si nøyaktig hvilken programvare som ligger på kortet når du får det.
Som det blir nevnt i kommentarfeltet er dette konfigurasjonen som ligger i instruksjonsmanualen til KK-kortet fra HobbyKing:

Men om du har fått et kort med 4.7-programvaren, eller oppdatert kortet selv skal motorene konfigureres som vist under.

Og for X-konfigurasjon med programvare 4.7 slik:

Hva om jeg gjør dette feil?
Om du kobler motornummerne riktig, men med motsatt rotasjonsretning vil helikopteret bare rotere fortere og fortere rundt sin egen akse. Dette kan du da rette ved å reversere Yaw-gyroen eller bytte rotasjonsretning på motorene. Da må du også bytte propellene slik at du får riktig skyvekraft. Om du setter på propellene motsatt vil farkosten presse seg ned i stedet for å presse seg opp og lette…
Siden det finnes mange typer KK-kort og mange typer programvare til det er det vanskelig å gi en endelig løsning på nøyaktig hvordan du skal koble ting opp på ditt kort. Det er også vanskelig for oss å vite når for eksempel HobbyKing begynner å sende ut kort med ny programvare.
Derfor bør du sette deg inn i instruksjonene som følger med kortet du kjøper og ikke minst prøve å forstå hvordan det hele virker. Da er det lettere for deg å eksperimentere deg frem til riktig løsning.
Det er ledningene som kommer fra hastighetskontrollerne som skal kobles på motorkontaktene på kortet.

Det er gjennom disse ledningene at selve KK-kortet får strøm. Du trenger med andre ord ikke å koble på en egen strømkabel for at kortet skal starte. Når du enkelt og greit kobler på alle de fire flatkablene fra alle de fire hastighetskontrollerne vil KK-kortet få strøm fra alle sammen.
I de forskjellige guidene vi har sett er det litt forskjellige anbefalinger. Noen mener at det er helt greit å bare koble til alle sammen med alle tre ledningene. Andre mener det er viktig at du kutter av pluss-kabelen på tre av flatkablene slik at kortet bare får strøm fra en av hastighetskontrollerne. Dette for å unngå forstyrrelser, jordings-sløyfer og skade på hastighetskontrollerne.
For å være på den sikre siden skal du derfor kutte den røde pluss-kabelen på tre av ledningene. Slik at kortet bare får strøm fra en ESC. NRKs helikopterekspert Petter Olden forklarer dette i kommentarfeltet til vår forrige artikkel:
Pettercam for 3 dager siden
Det er helt korrekt at du trenger kun at èn trefargetledning er koblet til KK-kortet med alle ledningene intakt (de har enten fargekode oransje, brun og rød eller sort, hvit og rød). På de andre tre trefargetledningene MÅ du kutte av pluss ledningen(e). De er røde. Dette er fordi at KK-kortet kun trenger strøm fra en av ESC-ene.Hvis du kobler til ALLE fire esc-er med alle ledninger til KK-kortet så risikerer man feilkalibrert og feilsynket strøm (litt vanskelig å forklare dette men håper det går…) og dermed vil esc-ene ødelegges IKKE KK-kortet. Grunnen er at alle esc-er, selvom de er “klin-like” aldri klarer å levere helt lik spenning og dermed vil esc-ene, hvis alle er koblet til med alle ledninger, risikere å ødelegges over en tid fordi de blir påvirket av strømmen som de andre ESC-ene leverer.
Oppsummering:
– IKKE mate KK-kortet med strøm fra ALLE ESC-ene, det er kun en ESC som trengs til jobben.
– Tre av ESC-ene må man modifisere/klippe av den røde plusskabelen (den som er trefarget).
Start your engines!
NB! På dette tidspunktet skal du IKKE ha propeller på farkosten. Nå tar du en ekstra sjekk. Alle ledningene. Pluss og minus. Stram koblingssukkerbitene.
Så sjekker du potmeterne på kortet. De er merket Yaw, Roll og Pitch. Holder du kortet med potmetrene mot deg kan de justeres som en hvilken som helst volumkontroll. Vri mot venstre er lavere verdi, vri mot høyre er høyere verdi.

Her har jeg sett rapporter om at potmetrene på enkelte kort er reversert. Så det kommer kanskje an på modellen. Men alle kortene fra HobbyKing som vi har sett fungerer som nevnt her.
Sett Roll på ca 50%, pitch på ca 50% og Yaw på 100%.
Så er du klar til å koble på strømmen. Når du plugger i batteriet skal ting våkne. Litt avhengig av hvilken radiomottaker du har vil et eventuelt LED-lys på den tennes. Så vil motorene spille sin lille ESC-melodi. Noe i retning pip-pip-pip — piiip-piiip-piiip —- piiiip
Selve KK-kortet har en sikkerhetsmekanisme innebygget. Så det våkner ikke før du slår det på ved hjelp av fjernkontrollen. Dette gjøres ved å ta venstre spake helt ned og mot høyre i ca 5 sekunder. Eller forklart på en annen måte: «throttle» helt ned og til høyre. Dette fordi du da er helt sikker på at ikke farkosten gir bånn gass uten kontroll når du setter i strømmen (dersom fjernkontrollen hadde gasspedalen eller «throttle» på fullt).

Når du gjør dette skal kortet «armeres». Da begynner lysdioden på kortet å lyse. Dersom den IKKE begynner å lyse kan det ha flere årsaker. Er strøm og alt koblet riktig kan det hende at du må reversere «throttle» eller «rudder» på fjernkontrollen. Siden du ikke har propeller på kan du tillate deg en sjekk: dra throttle helt ned og til venstre i fem sekunder. Dersom kortet da armeres må du reversere «rudder». Om ikke det fungerer drar du throttle helt OPP og til høyre. Dersom den da armeres må du reversere «throttle». Med min Futaba fjernkontroll måtte jeg gjøre nettop dette.
Om den fremdeles ikke armerer drar du throttle helt opp og til venstre. Om den da armerer må du reversere både throttle og rudder.
Hvordan du reverserer en kanal må du lese deg frem til i instruksjonsboken til fjernkontrollen. Dette er forskjellig fra modell til modell.
Et annet tips for å få kortet til å armere er å eksperimentere litt med trim-justeringen til throttle og rudder. Alle kanalene har en trim-knapp. Som oftest på høyre siden og under spaken. Høyre side er throttle-trim og under er rudder-trim. Prøv deg frem ved å justere ned throttle-trim og se om det armerer da.
Når kortet er armert på riktig måte kan du forsiktig dra throttle opp. Du vil da se at motorene etter hvert starter. Men at de starter på forskjellige tidspunkt. Setter du propeller på riggen din nå vil den være helt umulig å fly. Du må kalibrere alle hastighetskontrollerne slik at de starter nøyaktig likt. Dette gjøres med litt «KK-voodo»:
Koble fra batteriet slik at farkosten ikke har strøm. Slå av fjernkontrollen. Så:
-Skru Yaw-pot til null (helt mot venstre).
-Slå på fjernkontrollen.
-Dra throttle helt til maks.
-Koble på batteri (slik at KK-kortet får strøm).
-Vent til motorene piper to ganger etter at de er ferdige med sine innledende pipelyder.
-Dra throttle helt ned. Da skal motorene pipe igjen.
-Trekk ut batteriet igjen.
-Skru Yaw-pot tilbake til maks.
Når du nå slår på igjen og armerer tester du forsiktig med å dra throttle oppover. Da skal motorene starte helt synkront. Om de ikke gjør det repeterer du øvelsen over.
Sjekk motorene
Nå må du sjekke at motorene går riktig vei. Vi tillater oss å repetere tegningen fra lenger oppe i artikkelen:
Motor nummer 1 og nummer 4 skal gå med klokken, motor nummer 2 og 3 skal gå mot klokken. Start opp systemet og sjekk motorene. Dersom de ikke går riktig vei bytter du bare om på to av de tre kablene til den motoren som går feil vei (de tykke ledningene mellom motor og hastighetskontroller). Da skal den snu.
NB! Denne artikkelen har blitt oppdatert siden første versjon når det gjelder motorkonfigurasjon. Det ser ut som de fleste kort nå kommer med programvare som krever plassering og retning som anvist på den oppdaterte tegningen vi nå har lagt inn.
NBNB! I manualen til kortene som selges fra HobbyKing i skrivende stund oppgir de følgende motorkonfigurasjon:
Så som vi har beskrevet lenger oppe i artikkelen: følg med på manualen til kortet du har kjøpt. Konfigurasjonen avhenger av hvilken programvare som ligger på kortet. Og dette kan eventuelt endre seg om leverandøren begynner å sende ut kort med en annen programvare.
Når alle motorene starter synkront og går riktig vei skal du sjekke om styringen er riktig. Drar du høyre spake til høyre skal venstre motor øke hastigheten. Drar du den samme spaken mot venstre skal høyre motor få mer hastighet.
Drar du høyre spake fremover skal bakre motor gi på, og drar du samme spaken mot deg skal fremre motor øke hastigheten.
Drar du venstre spake til en av sidene skal hastigheten på motor 1 og 4 justeres i forhold til hastigheten på motor 2 og 3.
Det er veldig vanskelig å vurdere dette nøyaktig uten propellene på, så når du tror ting går riktig tar du av strømmen og setter på propellene. De såkalte «prop savers» som vi opprinnelig hadde i artikkel nummer 1 i serien fungerer greit men er ikke perfekte. Du setter dem på slik:


Men siden de bygger litt mye på motorpinnen fant vi ut at en liten modifikasjon med bor og fil gjorde det hele litt mer stabilt:

I ettertid har vi funnet noen fester som passer bedre og har oppdatert artikkel 1 i serien.
Jomfruturen
Gå ut, finn en stor åpen plass (helst gressplen) og sett quadkopteret på bakken et sted der det ligger så plant som mulig. Gå ca 10 meter unna, slå på KK-kontrollerkortet (venstre spake ned mot høyre i fem sekunder) og dra forsiktig opp throttle. Prøv å få quadkopteret ca 50 cm opp fra bakken. Det skal være noenlunde stabilt. Dersom det går til venstre når du vil til høyre må du reversere den kanalen på fjernkontrollen. Det samme gjelder de andre: om det går bakover når du vil fremover eller vrir seg mot venstre når du vil vri det mot høyre.
Men denslags justeringer er relativt enkle å se. Vi hadde problemer med to andre ting:
Først ville bare quadkopteret oppføre seg som en karusell. Det roterte rundt og var helt umulig å styre. Da var det den ene gyroen som måtte reverseres. Den såkalte Yaw-gyroen. Den holder orden på rotasjon. Og når den i utgangspunktet var satt opp «feil vei» drev den og forsterket rotasjon i stedet for å hindre rotasjon.
Ting så slik ut:
For å reversere en gyro gjør du følgende:
1: Set roll-potmeter til null
2: Sett strøm på batteriet / KK-kortet
3: LED-lyset på kortet blinker 10 ganger
4: Flytt litt på stikken for den gyroen du vil reversere
5: LED-lyset begynner å blinke kontinuerlig
6: Trekk ut batteripluggen / strømmen til kortet
Så hadde vi problemer med overkompensering. Da vibrerte farkosten frem og tilbake:
Dette løste vi med å skru potmetrene litt ned. Når farkosten flyr er det bare å begynne å finjustere. Med potmetrene på KK-kortet: skru dem opp mot maks til farkosten begynner å vibrere. Så skrur du ned litt og litt til den er stabil.
Og med trim-justeringene på fjernkontrollen: om quadkopteret hele tiden drar mot høyre, venstre, fremover, bakover eller i rotasjon kan du finjustere for å få det til å henge i ro i luften ved hjelp av trim-justeringene på fjernkontrollen.
Nå begynner dette å bli spennende, så da er det viktig at du ikke går tom for strøm mens du er i luften. Derfor har du bestillt en batterialarm. Den satte vi enkelt og greit på ved siden av natteriet ved hjelp av borrelås. Du kobler balanseringspluggen fra batteriet til alarmen. Pass på at pluss og minus kommer riktig på hver sin side. Alarmen gir et høyt pip og lyser med tre grønne LED om du har koblet riktig. Når batteriet begynner å bli dårlig begynner den å blinke rødt. Så begynner den å pipe høyt.

Da er det bare å fly. Her er en liten samling testklipp fra noen turer med betakopter V1.
Som dere ser har vi allerede utvidet litt. Med pan/tilt for å kunne justere 808-kameraet og med diverse lys for å se tydeligere forskjell på bak og frem i mørket.
Viktig: før hver tur bør du gå over alle skruer og stramme dem. Vibrasjonene gjør at de kan løsne. Du vil IKKE at en propell detter av eller at en sukkerbit mister strøm til en motor mens du er 20 meter oppe i luften!
Jeg har fått god hjelp både på fpv.no og modellflynytt.no under byggingen. Trådene der denne artikkelserien diskuteres er:
FPV.no – Byggelogg på NRKbeta
Modellflynytt.no – Byggelogg på NRKbeta
Da er det bare å fyre løs i kommentarfeltet. Med både spørsmål og linker til bilder og tips!
Oppdatering:
Martin linker til følgende video i kommentarfeltet. Den gir mange tips angående detaljer rundt KK-kortet og hvordan du setter det opp:
Flott guide! Jeg ble enda mer interessert i å bygge etter å ha lest fortsettelsen. Men jeg har noen spørsmål:
– Til mitt modellfly må jeg skru senderen på først og koble til strømmen i flyet etterpå for at mottakeren skal virke normalt, og motsatt når jeg skal skru av. Jeg kunne ikke se det i artikkelen, så derfor lurer jeg på om senderen er på når dere kobler til strømmen i kopteret?
– Har dere noen av/på-bryter mellom batteri og ESC-er eller plugger dere bare i batteriet før bruk?
Hvis du skal montere bryter mellom batteriet og Esc, så bør den være av det solide slaget. Siden hver av motorene kan trekke inntil 9,5A, får du 38A maks strøm, og det er ganske mye. Spørs om WAGO-klemma også vil kunne slite litt med den strømmen der…
Wago oppgir 32A for disse klemmene, så det går nok helt fint med 38A i kortere perioder.
Hva med å ta det ett steg videre? 🙂
First manned multicopter takes flight, brave human sits amidst blades (video)
Gale, gale ingeniørene… Vi overlater den til NRKbetas ekstremsportalibi: Marius Arnesen. Ser rett og slett ikke helt trygt ut. 🙂
Dere er helt rå 🙂 Venter på deler jeg nå bare, mesteparten ligger i tollen i Norge nå. Bestilte dobbelt opp av hver ting så jeg kunne i teorien bygge to men til de som skal bestille nå: ikke gjør som meg! Jeg gikk på en liten budsjettsmell på grunn av ekstra toll på ting. Ble et par tusen ekstra men shitt au, gleder meg som et lite barn!
NRK beta er blitt mitt favorittnettsted, keep it up! 🙂
Herlig å følge med på prosessen selv om jeg neppe vil bygge noe selv med det første. Hadde vært svært tøft å kunne styre quadkopteret via video feed fra kameraet til en pc, eller med radio kontrolleren og en lcd skjerm. Hva er eventuelt utfordringen dere ville måttet løse i forhold til dette?
Flott artikkel.
Venter bare på ESC’ene som aldri kommer på lager, så er jeg klar. :p
Vedr. lading av batteriene:
Jeg har blitt fortalt at LiPo-batterier skal lades med 1C (C står for capasity)
Eksempel:
På et 3 cell 2200 mah batteri står det 15C. Dette batteriet kan da belastes med 15 X 2200 = 33 000 mah = 33 A. Dette gjelder strømtrekk ut.
Batteriet tåler ikke like heftig lading. 1 C i dette tilfellet vil være 2200 mah (eller 2.2 A). Man kan evt. lade med noe mer Amp, men dette vil svekke batteriet over tid.
Takk!
hm… det betyr vel at batteriet her er litt i underkant, siden motorene kan trekke opptil 38A. Kanskje det hadde vært bedre med lokalt batteri til hver motor, evt 2-4 parallellkobla batterier (i tilfelle ett skulle ramle ut)?
Belastningen på batteriet vil nok sjelden bli 38A i og med at man sjelden kjører et quadcopter på full gass. Om man gjør det vil det uansett bli korte perioder, og det tåler som regel batteriene.
Hadde man hatt samme oppsett i f.eks. et fly , måtte man nok hatt kraftigere batteri.
Ikke helt sant. Det angies ofte 2 C-varianter på abtterier i dag: En for utlading og en for opplading. Det er ikke uvanlig av man kan lade batterier på 5C for eks. På ett slikt 2200mAh kan man da lade det med 11A! Ladetiden blir redusert til ca 10min i såtilfelle.
Det er forøvrig anbefalt å holde seg til 1C uansett ladekapasitet, men i noen tilfeller «kan» man ikke vente 1 time for å ha opplada batterier å flekke til med noen flere C på ett batteri som er dimensjonert for det betyr ikke stort.
Dette er grunnen til at jeg betaler lisensavgift med glede!!
Hvor stor kapasitet (mAh) har dere på batteriene, hvor mye (ca) veier de og hvor lang flytid får dere ut av det?
Vi bruker stort sett 2800 mAh. 30C. De veier 212 gram og gir en flytid på ca 10 minutter med vår ganske tunge men funksjonelle, billige og solide rigg. Det er mulig å bygge dette mye lettere og dermed få lengre flytid på samme batteri. Tipper en mer erfaren pilot også vil få lengre flytid. Blir mye kompensering og vingling når vi er ute og øver oss…
På en måte artig, men samtidig veldig fjernt fra det jeg forventer fra NRKbeta.
Hva blir det neste? Hjemmelaget gitarkurs, av og for nybegynnere?
Her var nerdefaktoren alt for lav 🙂 Dette er guttemekking på 10-års stadiet!
Forventer at lista legges en god del høyere i neste prosjekt.
Nope. Det blir isåfall gitarbyggekurs av erfarne for erfarne. Kollega Hofseth har mange fete gitarer på samvittigheten…
Og angående helikopter kommer vi til å følge opp med en sak om NRK’s octo og profesjonell bruk i fjernsynsproduksjon. Det blir kanskje nerdete nok? 🙂
Sløydgitar er faktisk sterkt undervurdert! Problemet er at sløydlæreren svært sjelden er gitarist og ikke vet hva slags materialer som egner seg til hva og f.eks. mensur og intonasjon er. Derimot med en veileder som både har peiling på trearbeid og elektronikk, så er dette både gøy og lærerikt.
Selv er jeg leken nok til å kunne gått i gang med et QGC – Quad Guitar Copter prosjekt basert på en Ibanez RG350, jeg ikke bruker så mye. Vedder på jeg hadde ligget godt an i the World Annual Air Guitar Contest.
[Liker]
Tusen takk for en fin artikkelserie, håper at det kommer flere deler. Dere har bl.a. vært inne på å komme nærmere inn på fpv. Jeg sitter med noen spørsmål. Dere skriver i denne artikkelen at dere har bygget en med større kryssfinerplate i midten og lengre armer. Påvirker dette fly-egenskapene? Er propellene lengre unna sentrum, hvordan påvirker dette eventuelt fly-egenskapene? Merker meg også at dere også har satt på pan/tilt, hvordan er det koblet og hvordan styres det? Har et siste spørsmål, er det noen som har erfaring med radio FlySky, som er til salgs på ebay?
Lengre armer skal gi en «roligere» farkost. Propellene står lengre fra hverandre og må gjøre litt større utslag for å vippe quadkopteret.
Pan/tilt har vi koblet på to ekstra kanaler på fjernkontrollen. Disse kanalene styres med potmetre. Men denslags blir mer nyttig når styringen er koblet til kontrollerkortet i tillegg. Slik at kamera stabiliseres automatisk. Enn så lenge støtter ikke KK-kortet automatisk kamerastabilisering.
Når det gjelder FlySky har vi ingen erfaring, så den må vi overlate til andre.
Tusen takk for en herlig artikkelserie. Dette ser moro ut, men jeg savner fremdeles (som nevnt i del 1) en beskrivelse av hva som trengs/hvordan man får til FPV. Da tenker jeg på en liten LCD-skjerm festet til radioen og et lite kamera festet til quadkopteret. Kan noen hjelpe med hvordan jeg går frem for å få dette til og hvilket utstyr jeg må skaffe til veie for at det skal kunne fungere? Poenget er å kunne fly uten å måtte se på quadkopteret.
Vi vil på det sterkeste anbefale at folk begynner med å lære seg å fly skikkelig uten FPV. Videosender og den typen flyging krever mer kunnskap og erfaring. Ikke minst i forhold til lover og regler. Både når det gjelder videosendere og når det gjelder flyging uten direkte øyekontakt med farkosten.
Vi kommer til å titte på FPV etter hvert også. Men det blir nok en stund til. Om du er svært utålmodig er http://fpv.no din venn! 🙂
Herlig artikkel! Er nylig ferdig med å bygge tricopter selv, etter guiden til rcexplorer.se. Har montert GoPro på den, og det ser ut til å være ganske mye mer stabilt enn betakopteret deres, sikkert på grunn av de lengre armene. Liten testvideosnutt: vimeo.com/31735762
Hovedgrunnen til at video fra 808-kameraet på vår rigg til tider er svært ustabil er nok mer selve kamerafestet enn quadcopteret. Men generelt er det riktig at trikopter med lange armer er stabile og fine.
Sant nok, uansett fungerer kamerafeste til Windestål utmerket 🙂
Er det noen som vet hvor jeg kan finne kildekoden til dette? Det har blitt nevnt at den er GPL, men jeg har ikke klart å finne den. Det vil si… Jeg fant noe her – kkmulticopter.com/index.php?option=com_content&view=article&id=52:quadrocopter-firmware�… – men når jeg pakker ut den, så ligger det bare noe prekompilert-i-hex og assembly. Jeg har jobba litt med atmega fra før og … atte … man bruker da ikke assembly i 2011, gjør man? man gjør kanskje det om man heter Rolf Bakke… Tenk om noen kunne skrive om dette i noe litt mer forståelig som C? 😛
Svarer meg selv her… Det er visst slik at den opprinnelige koden var skrevet i assembly, og denne eksisterer fremdeles, og utvikles av KapteinKuk. Denne koden har blitt portet til C i et par omganger, og den siste er visst rcgroups.com/forums/showthread.php?t=1526268 fra februar i år. Så, hvordan velge hvilken programvare man skal kjøre, avhenger vel mest av om du kan bruke koden som den er, eller om du vil utvide den sjøl, og hvis så, om du er stø i assembly eller foretrekker et «høynivåspråk» som C.
Litt mer her – de nevnte prosjektene er alle aktive på bloggen på rcgroups.com, men så vidt jeg kan se finnes ikke mailinglister eller noen IRC-kanal. OpenPilot.org ser derimot ut til å være noe bedre strukturert. Der er det laget en kontroller som er nogle hakk dyrere enn den fra kk, men som til gjengjeld virker endel hakk hvassere: 72MHz ARM Coretex A3, Seriebusser: 5 USART, 2 SPI, 2 I2C, 32bit-akritektur, og sannsynligvis ARMs conditional execution (i stedet for branches, sånn at lettere unngår cache flush). Den kommer også med «ground control software» for å styre ting sentralt, med autopilot og etter hva jeg kunne se auto-retur i tilfelle radiofeil.
Med de serielinkene, vil det være mulig å lettere å snakke med andre ting, som for eksempel nevnte Pandaboard (under) eller kanskje innmaten til en gammel Android-telefon? 😉
roy
Vi har bestillt et par OpenPilot CopterControl-kort. Så vi kommer tilbake i kommentarfeltet her med litt erfaring når vi har fått dem.
Jeg lurer på hvor dere får kjøpt de korta?
Det er visst utsolgt inntil videre, i hvert fall i Europa. Det jobbes med en ny batch, men jeg har ikke sett noen dato. Det går an å melde seg på mailing liste for openpilot, evt gå inn på #[email protected] på IRC
roy
Jeg kom over denne siden som kanskje kan være interessant. : multiwiicopter.com/ Den er basert på en Arduino Pro og har blant annet auto-levelling.
Dette er jo vel og bra, men om man skal gjøre noe mer ut av det, så er jo den Atmel-brikka noe i minste laget til å kunne brukes til noe mer. Vi vil vel helst ha muligheter for streaming over 802.11n, både til monitor og potensielt til en server et sted? GPS hadde jo også vært greit for å kunne geotagge alt, gjerne også det i sanntid. Så kanskje et pandaboard til å gjøre grovarbeidet? 🙂 På et pandabrett har du en dual-core 1GHz OMAP4430 ARM Coretex A9, 1GB minne, 802.11n, og tilkoblingsmuligheter som kamera, kortlesere for SD-kort og diverse busser. CPU-messig er det nok voldsomt overkill, men det skader ikke med litt ekstra 🙂
Du må vente til de får inn nye kort her: opstore.eu/en/1-coptercontrol.html Som det blir nevnt over kan du få epostoppdatering når de kommer.
Eirik Solheim; fikk du testet propellene fra DealExtreme? Litt dyrt på den sjappa i tyskland. Propellene kosta rundt €3 for 2stk, men så var det 200~ ifrakt, så 250~ i toll\gebyr. Heh.
Om du dropper propsavers og går over til propellfester. Men da må du også kjøpe deg en propellbalanserer. Jeg benytter denne:
shop.smallsize.no/product_info.php?products_id=2658&osCsid=bbd2a74313eb450915a5a0bbc350eb91
Med denne løsningen må du bore ut propellene selv. Det er ikke vanskelig, men kan føre til små unøyaktigheter og da er det absolutt best om du får balansert propellene skikkelig etter boring.
Jeg benytter dette nå. Billige propeller fra Dealextreme som jeg borer ut med et 5 mm bor. Flyr helt strålende:
Fester: dealextreme.com/p/r-c-plane-3-0mm-motor-shaft-propeller-prop-adapter-5-pack-82424
Propeller: dealextreme.com/p/nylon-9-x-5e-propellers-for-quadkopter-black-5-piece-67108
[…] I neste del tar vi for oss sammenkobling og siste finpuss. […]
Hei
Kanskje jeg har gått glipp av noe?
Når dere flyr i demo-video, ser det ut som dere flyr i X-konfigurasjon, stemmer det? I del 1 og del 2 refererer dere til +-konfigurasjon og beskriver hvor de ulike motorene skal plasseres.
Jeg sitter med ett KK Quad X4.7 kort og antar det er i X-konfig, men hvor skal da de ulike motorene plasseres, venstre fram motor1? osv.
Øyvind
Det er helt riktig observert. Vi har koblet kortet til laptopen og lastet opp ny programvare via en USB-kortflasher og kjører 4.7 i X. Men siden artiklene våre er beregnet på nybegynnere har vi tatt utgangspunkt i KK-kortet slik det kommer fra HobbyKing i + for at folk skal slippe å kjøpe programmerer og styre med programvarebytte.
Men har du flashet kortet eller bestillt det med X-programvare er motorkonfigurasjonen slik:
X-mode setup 4.7
Motor 1: front left, CW
Motor 2: back left, CCW
Motor 3: Front right, CCW
Motor 4: Back right, CW
Hei, og takk for tilbakemelding.
Da blir det oppkobling til helga, og kanskje første flytur…
Øyvind
Culexus har skrevet en fin guide for programvare versjon 4.7 på FPV-forum:
fpv.no/vbulletin/showthread.php/850-Guide!-Ny-firmware-til-KKmulticopter.?s=cc9bae059748def6da77622772b76f4b
Her er noe for de som vil ha et nytt prsjekt etter quadkopteret, nemlig et Gunship fra Avatar. Denne er laget med et KK-kort, men med en annen programvare: youtube.com/watch?v=KJCgVdv6U0I
Vi har fått kloa i et par OpenPilot CopterControll-kort.
Har ikke fått testet mye, men det lille jeg har fått testet viser seg fra en svært så stabil side.
Her er en bitteliten snutt:
happygolucky.no/2011/11/15/openpilot-ftw/
Hvor fikk du tak i dem? Jeg vil veeeeeeeldig gjerne ha et slikt til å prototype et kopter….
roy
Vi fikk tak i dem direkte fra OpenPilot i forbindelse med at vi jobber med denne artikkelserien.
De er imidlertid utsolgt i alle andre kanaler etter hva vi kan se…
Så – leser jeg det rett at CopterControl er hakket hvassere enn KK-kontrolleren?
Lurer på hva det vil koste å få bestilt produksjon av disse hvis man får tak i PCB layout eller finner noen som kan lage det… Kanskje like greit å bestlle opp noen om det tar altfor lang tid å vente på OpenPilot-gjengen 😛
roy
Ja. Uten tvil. Mens KK koster $24,- så koster CC $100,-
Det viktigste er at CopterControl har aksellerometer som gir en egen «stable mode» der du bare kan slippe spakene, så retter farkosten seg opp av seg selv.
Og så vidt jeg har skjønt er det snakk om bedre prosessor og bedre gyroer. Og utvidelsesmuligheter samt firmware som støtter automatisk kamerastabilisering.
Ellers er også MultiWii meget spennende. Du får ferdige kort her:
quadframe.com/collections/frontpage/products/mwii01
multiwiicopter.com/products/paris-quad-tricopter-sirius-600-mp-v4-0-llc-plug-n-play
De har også aksellerometer osv.
Men: KK-kortet er perfekt for nybegynnere. Fordi det er billig, stabilt og lar deg lære å fly skikkelig før du går videre til neste steg…
Er ikke noe vanskelig å få tak i Gerber-filer til CC. Gå inn på Git-hub’en til OpenPilot og der finner du Gerber-filer til både CC og FOSS JTAG. Har også tenkt å lage meg noen kort. Bestilte gyroene i går. Heldigvis har jeg en kollega som bor i USA, så det halverte prisen for 3 av hver gyro inkludert frakt… 🙂
Kan ikke annet enn å digge NRKbetas lesere. Her lager vi byggeartikkel for n00bs, så begynner dere å konstruere kontrollerkort fra grunnen av. 🙂
Det er jo selvfølgelig kun for å glede han som surmulet i del 1 om at dette ikke var geeky nok… 🙂
🙂
Det jeg stusset på var for det første at NRKbeta plutselig syslet med modelbygging og el-motorer (noe jeg selv har drevet med i årevis i forskjellige varianter helt fra 1966). For det andre er jeg vant til at Erik & co har et høyt kunnskapsnivå på det området de skriver om. Her virket det som om de var svært ferske i utgangspunktet, noe jeg ble litt skuffet over.
Nå har jo resultatet av hele prosjektet likevel blitt veldig interessant og bra, ikke minst på grunn av innspill fra mange kompetente og entusiastiske folk.
Så jeg tar flengende selvkritikk på mitt første, noe grumpy utspill!
Positive bidrag fra leserne og en åpen og ryddig holdning fra NRKß-redaksjon skapte en morsom og spennende tråd, med mye lærerikt stoff for mange.
Og bra flyving i Frognerparken, Erik! Kudos!
Blix
Fant dem – må bare se hvor jeg kan få printa kortet – hvem bruker du til dette?
roy
Har ikke gjort det ennå, men planlegger å bruke . Tar litt tid før jeg får kortene, men haster ikke… 🙂
Jeg har brukt olimex.com med en rekke ganger med godt resultat. Anbefales.
Jeg har også brukt Olimex før, men de lager kun enkeltsidige og dobbeltsidige kort. For en CC trenger du 4-lags kort.
Fant også iteadstudio.com for noen dager siden. En del billigere enn Olimex, men vet ikke hvordan kvaliteten er.
Vet ikke hvor kommentaren min gjorde av seg, men prøver igjen… 🙂
Har ikke gjort det, men planlegger å bruke DorkbotPDX (dorkbotpdx.org/wiki/pcb_order). Tar litt tid å få kortene, men det haster ikke. Får ikke gyroene før jeg drar på jobb i desember allikevel… 🙂
Jeg er litt forvirra her – hva slags propell bør jeg velge om jeg vil kjøpe noe fra hobbyking? De kommer jo i ørten varianter… De listet opp i del 1 er noen med diameter 10″, men når jeg slår opp på hobbyking, er det listet opp flere (f.eks, 10×6 og 10×9) – jeg antar at henholdsvis 6 og 9 her er «slope», men vet lite om hva det er og hvordan det påvirker farkoste… Kan noen hjelpe meg med et forslag eller tre her?
roy
oh samtidig – er det neon som vet om batterialarm og -lader fra hobbyking? kanskje greit å begrense antall steder man bestiller fra?
Alarm: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=7223
Lader: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=5548
Power til lader: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=6477
Jeg skriver litt om propeller lenger oppe: nrkbeta.no/2011/11/08/slik-bygger-du-ditt-eget-quadkopter-%E2%80%93-del-2/#comment-108164
Men det er DX-anbefalinger.
Men fra HK får du propelladapter: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=8722
…det viktige er 3 mm shaft.
Så må du bore ut propellene til 5mm. Men da kan du bruke disse:
hobbyking.com/hobbyking/store/__11333__10X6_Propellers_Standard_and_Counter_Rotating_6pc_.html
…og da bør du balansere (se kommentaren lengre oppe).
Jeg har også hatt suksess med 9×5-propeller. Og det KAN set ut som om disse har 3 mm hull: hobbyking.com/hobbyking/store/__11322__9x5_Propellers_5Pcs_Bag_.html
Da kan du i såfall bruke dem rett på motoren med prop-savers.
Har kjøpt noen og kan bekrefte at de har 3mm hull.
Jeg har forøvrig også testet 11×4.7 propeller også, (hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=22450), og de fungerer også bra. Farkosten er stabil, men reagerer nok ikke så kjapt. En fordel er at det er mye lettere å holde noenlunde konstant høyde, muligens fordi de store propellene hindrer raske variasjoner i turtallet. Hvordan det påvirker hva quadkopteret klarer å løfte har jeg ikke sjekket ennå.
Det blir også litt mykere landing om jeg skulle finne på å kutte motorene litt brått.
Rettelse: Propellene har ørlite grann større diameter enn 3mm. Oppdaget det ikke før jeg skulle bore dem opp og piloten på brotsjen min gikk mistenkelig romt i hullet.
Er det bare meg, eller er hobbyking.com totalt på bærtur? Jeg sitter her og bestiller, og så plutselig har den skrudd opp antalle ladere til 6, men glemt at jeg skal ha hastighetskontrollere (som jeg ba om 6 av)… Nå har jeg prøvd på Firefox og med Safari, men den virker fremdeles å være ute og sykle…..
Har også lagt merke til at det siste antallet du oppdaterte til i handlelista er det samme antallet som kommer på neste ting du legger inn.
Kjøpte noen 10×4.5 propeller fra eBay og de er seriøst ubalanserte. Jeg får finne frem Dremelen istedenfor bare en liten hobbykniv… 🙂
Har noen prøvd alternativ firmware til ESC’ene fra rcgroups.com/forums/showthread.php?t=1513678 ?
Ser ut som om strømforsyning til den laderen var utsolgt for tida. Vil noe sånt gjøre jobben greit? elfaelektronikk.no/elfa3~no_no/elfa/init.do?item=69-636-24&toc=19681
Ser også ut som at de hastighetskontrollerne ikke var på lager – vil noe sånt som dette funke? hobbyking.com/hobbyking/store/__658__TowerPro_W30A_Brushless_Speed_Controller.html
Til sist – dette radiosettet var latterlig billig – vil det funke greit for en nybegynner? hobbyking.com/hobbyking/store/__8992__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_2_v2_Fir…
Og – jeg regner med at batterier kan kobles i parallell uten videre dikkedarer?
roy
Så lenge batteriene har samme spenning, skal du kunne koble dem i parallell.
Som de sa i første del, den radion kan være bra, men det er hit’n’miss om du er heldig eller ikke.
Jeg bestilte Turnigy TY-P1 ESC, og planlegger å legge inn ny firmware fra rcgroups.com/forums/showthread.php?t=1513678 dersom det er Atmel i dem, som det virker som det er ifølge en post i den tråden.
Det var radioen jeg tenkte på, men den er visst ikke på lager. Den jeg så på, var denne hobbyking.com/hobbyking/store/__8338__Hobby_King_2_4Ghz_4Ch_Tx_Rx_V2_Mode_2_.html
Er det helt Gaustad å satse på noe sånt?
roy
Den du linker til der vil i teorien fungere. Absolutt minimum er fire kanaler og mulighet for å reversere kanaler. Og det ser det ut som den har. Men om du blir så mye som en antydning interessert i dette vil du ha noe bedre. Og det kan by på problemer at den ikke på noen måte er programmerbar. Du vil fort justere litt på hvordan ting styres.
Jeg ville mye heller satset på denne: hobbyking.com/hobbyking/store/__8992__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_2_v2_Fir…
Kollega Arnesen kjøpte en slik. Og er strålende fornøyd. Ryktene sier at det er litt ullen kvalitetssikring på dem, så du kan være uheldig. Men funker den er den helt super og veldig mye radio for pengene.
Ellers vil jeg fremdeles anbefale bruktmarkedet. Jeg betalte kr. 350,- for min Futaba 8U med en mottaker. Fikk den i 35 mhz FM-versjon, men kjøpte dette lille settet og fikk oppgradert til 2,4 gHz: hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=14348
nå var som sagt den der backlista, så jeg får håpe jeg får den billige, så får jeg heller skaffe noe bedre fra bruktmarkedet senere.
Uansett takk for svar 🙂
roy
Du kan eventuelt kjøpe Mode1 og bygge den om. Det var faktisk det Mr. Arnesen gjorde. Om du er istand til å bygge en quad er du istand til å bytte fra mode 1 til mode 2 på denne: hobbyking.com/hobbyking/store/__8991__Turnigy_9X_9Ch_Transmitter_w_Module_8ch_Receiver_Mode_1_v2_Fir…
….men de har satt opp prisen på mode1-radioen av en eller annen merkelig grunn.
Men som de sier selv under den billige: finfin backupradio…
Takk for veldig god byggelogg. Har tenkt til å følge deres byggeoppskrift, men venter fortsatt på en del varer fra HK. I tillegg har jeg ikke bestemt meg for radio ennå. I den forbindelse lurte jeg på om hva som en person uten amatørradiolisens har lov til å operere. Jeg ønsker å ha muligheten til å utvide med FPV og har forstått det slik at man vil få kraftig interferens ved å ha video og radio på 2,4GHz.På meg virker det som om jeg må gå for 35MHz på radio og 2,4GHz 10mW på video, eller er det andre anbefalte måter å gjøre dette på?
Har du en 2.4 GHz sender så kan du jo kjøpe en 5.8 GHz videosender/mottaker. Til et slikt prosjekt med Quadkopter så er 5.8 GHz veldig bra til nærflyging. Dvs til å fly rundt på en parkeringsplass, en park uten folk osv…
Bare husk å ha en kamerat med til å være dine øyne og se modellen fysisk (LOS – Line Of Sight), mens du titter på en skjerm/videobriller. Tenk ALLTIDS sikkerhet folkens.
[…] camera is a 808 HD. And the build log is in Norwegian: Part 1 and Part 2. Here is the Google Translate version: Part 1 Google Translate and Part 2 Google […]
Dere skriver at «Farkostene på bildet har lengre armer og større kryssfinerplate i midten.» Fant dere noen grei størrelse for oss n00bs? Jeg har lister på cirka 90cm og en stor nok bit 3mm kryssfiner…
Arnesens monster-quad har vel 75 cm mellom motorene og ligger svært stabilt i luften. Men er jo da også tyngre og litt mer upraktisk å ta med seg.
Du kan jo prøve deg med 60 cm mellom motorene og 5 cm ekstra utenfor hver motor. Mao. 70 cm armer, med motorene 5 cm inn fra enden på hver arm.
Har lest et sted at 60 cm er en fin nybegynnerstørrelse.
Men det meste flyr… Jeg kjører for tiden med en morsom liten sak jeg bygget med 38 cm mellom motorene… Men må innrømme at akkurat den gjør god nytte av den ekstra stabiliteten i CopterControl-kortet vi driver og tester.
Flott guide! Får utrolig lyst til å bygge en selv. Har dere gjort noen tester rundt hvor mye den klarer å løfte? Og hva er selve vekten på Quadkopteret?
Vekten på selve farkosten med batteri, radiomottaker og det hele blir 1-1,5 kilo. Avhengig av hvilke løsninger du velger, hvilket batteri du setter på og hvilken mottaker du har.
Vi har ikke testet den absolutte maksimal-løftevekten. Men tipper den er på rundt 0,5 kilo. Det er også avhengig av hvilke propeller du velger.
Vi flyr helt fint og uten merkbar påvirkning annet enn litt lavere flytid med et GoPro festet på QuadKopteret. Jeg har også flydd med et kompaktkamera hengende på. Det veier ca 250 gram og førte heller ikke til problemer.
Selve konstruksjonen er meget solid, så om du setter på større motorer kan du sikkert få denne typen farkost til å løfte opp mot en kilo.
Hei, jeg og mine klassekamerater satt sammen et quadkopter etter deres oppskrift, men nå vi skulle skru på kontrollen, kom det «Switch Error» på displayet. Hva er galt? Vi regner med det er på kontrollen noe er galt, men har prøv å stille mange knapper før vi skrur den på osv..
Vet dere hva som kan være galt? takk 😀
Du har ikke sagt hvilken radio det er snakk om, men dersom det er Turnigy 9x, må alle brytere stå i opp-posisjon når du skrus på radioen, ifølge noen kommentarer hos HK.
Stig har rett. Om det er en Turnigy 9x må alle bryterne stå opp, eller FRA deg for å unngå den klassiske «switch error».
Hehe, var det ja. Fikk det til nå. Vi hadde så lite tid igår så fikk ikke prøvd alle kombinasjonene 🙂
Takk for raskt svar! Da skriver jeg bare her hvis vi får flere problemer 🙂
Hei, vi var klare til start nå, men får ikke på KK-kortet. Trenger vi strøm til Receiveren? Står 4,5-6,5V så tør ikke koble direkte på batteriet.
Batteriet kobles til alle ESC’ene. ESC’ene kobles til KK-kortet. Dette gir strøm fra ESC’ene til KK-kortet. Det er litt delte meninger om du må kutte +-kabelen fra 3 av ESC’ene eller ikke. KK-kortet kobles til receiveren. Dette skal gi strøm til receiveren fra KK-kortet.
Husk på at KK-kortet må armeres ved å sette venstre stikke ned og til høyre (som vist litt over)
Takk 😉
Hei igjen.
Vi har nå lys i radiomottakeren, og disse hastighetskontrollerne spiller sine melodier..
Men vi få ingen lys på KK-kortet. Vi har prøvd å holde spakene i alle retninger i 5 sekunder hver, men får det ikke armert uansett. Vi har også prøvd de tingene dere har skrevet uten hell.
Hva kan være galt? Kan KK-Kortet være defekt?
Heisann!
Jeg sleit også veldig med å få armert KK-kortet med Turnigy 9x, men det gikk til slutt.
Prøv med følgende settings på fjernkontrollen:
Type Select: Heli1 -> Heli2
Modulat: PPM
StickSet: Mode2
Reverse ELE og THR
Dere har Bindet mottaker og kontroller med hell?
Hei, takk for svar!
Prøver dette i morgen 😀
Men hva mener du med «bindet mottaker og kontroller» ?
Har aldri satt sammen noe slikt før, så kan ikke noen ting om slike ting 🙂 Takker igjen for all hjelp!
Fant det ut nå. Måtte bytte til mode 2 på stick mode..
Flott 🙂
Ser fram til å sjå video av det her 😀
dezeen.com/2011/11/24/flight-assembled-architecture-by-gramazio-kohler-and-raffaello-dandrea/
Hei igjen!
Vi har prøvd deres måte å få motorene til å gå synkront, men fikk det ikke til. Så tok vi en titt i manualen til hastighetskontrollerne, og der fant vi mye. Men problemet er at når vi skrur av helikopteret for å sette Yaw-gyoren på 100% igjen, så «resettes» innstillingene.
Det går heller ikke å starte hastighetskontrollerne i denne instillingsmodusen når Yaw er på 100%, så vi vet ikke hva vi skal gjøre. Noen som vet? 🙂
Her må jeg innrømme at vi bare har fulgt oppskriften. Og det har fungert på alle kortene. Men jeg mener å huske at vi måtte gjøre det et par ganger på noen av dem. Det er noe med timing på når du drar ned throttle i forhold til pipelydene som er litt uklart.
Som du har sett er det mange programmeringsmuligheter i selve hastighetskontrolleren, men der har jeg også ganske dårlig erfaring med å få det til å fungere. Jeg har endt opp med å programmere via KK-kortet.
Vet ikke om andre har bedre råd angående synkronisering av motorene?
Jeg lurer på om styrekortet med gyroene må sitte i senter, bare retningspilen peker forover. Funderer på et quadkopter i X, som har en kvadratisk ramme med kamera foran og styring bak. Et batteri på hver side, for å få vekten jevnt fordelt, kan flytte batteriene slik at vekten foran og bak også blir lik. Dette for at sikten fra kameraet skal bli best mulig.
jeg lurer på det med radio, må man gjøre noe med
kk-kortet for å bruke radio med mode2 forhold til radio med mode1.
Set opp radioen for mode 2 så slipper du å spekulere…
Litt treg i starten, men nå har jeg fått bestilt alle «standarddelene» utenom motorer og propeller.
Nå når dere etterhvert har bygget flere varianter med tilsynelatende forskjellige motorer/ propeller/ «prop-savers» eller propellfester, hva bør jeg bestille? Er den orginale motoren og de «litt bedre» prop-saver’ene fortsatt anbefalt å starte med, eller har dere funnet noen bedre kombinasjoner? Er det eventuelt noen andre her som synes de har funnet den perfekte kombo?
Hei! Har akkurat satt sammen en quad med KK Plus v5.5e som skal være lastet med Quad X 4.7. Har koblet sammem quad’en og alt er tilsynelatende i orden, bortsett fra at motor 4 ikke gir like mye effekt som de andre. Noen som har en formening om hva dette kan skyldes?
Har forsøkt å bytte motor og esc, samt gått over innstillinger på esc nok en gang, men problemet ligger fortsatt på motor 4.
Hei Johnny! Hvilke motorer har du kjøpt? Har du kjøpt fra Hobbyking så kan man være så uheldig å ha fått en defekt motor. Derfor bør man alltids kjøpe et par ekstra. Ellers ville jeg ha flashet en gang til på KK-kortet for så og kjørt en kalibrering av potmeterene av esc-er og motorer.
Hei og takk for svar!
Tenkte at det var motor først, men byttet så motor med posisjon 3. Deretter snudde jeg kortet og problemet lå fremdeles i posisjon 4 (bak høyre). Nå har jeg flashet kortet og kan ikke se noen forskjell.
Har et HobbyKing-kort i posten nå, så får se om det løser problemet. Har forøvrig forhåndsbestilt ArduPilot Mega 2.0 også nå:) så det skal nok løse seg..
Men hvis noen har opplevd tilsvarende problematikk tar jeg gjerne imot tips.
Hei,
Jeg har også problemer med motorer som det ser ut til ikke gir like mye kraft.
Jeg ser at du har flashet kortet, har du en beskrivelse av hvordan du koblet til usb-kortet. Det jeg fikk tilsendt sammen med kortet kommer med 4 ledninger, men ingen beskrivelse for hvordan/hvor det skal kobles til KK-kortet. Tips?
Øyvind
Hei!
Jeg kjøpte MKUSB-linker fra http://www.mikrokopter.de – jeg måtte lodde på pins og installere kkplus tool v1.24. Når det gjelder tilkobling er nok ikke jeg rette mann å spørre, men jeg fant ut hvordan det skulle gjøre ved å søke på nettet. Her er link til videoen: youtube.com/watch?v=tWgHoBQX6-Y
Men som sagt så kommer det vel an på hvilket kort og/eller programmerer du har.
Firmware (hex-fil) fant jeg her: fpv.no/vbulletin/showthread.php/850-Guide!-Ny-firmware-til-KKmulticopter.?s=cc9bae059748def6da77622772b76f4b
Håper det var til noe hjelp..
Kan jo også være verdt å nevne at det ikke løste problemet mitt 🙁 så jeg setter min lit til at HobbyKing-kortet løser problemet..
Takk for svar, dette skal prøves ut.
Øyvind
Har det samme problemet med at motor 4 ikke vil gi like mye effekt som de andre og den holder igjen og drar over. Brukket fire proper på dette nå så begynner å bli lei. Noen som har en løsning, flashet med x v4.7.
Bruker du KKPlus-kortet? Jeg bestilte Hobbyking sitt, installerte det, og da funket min som bare det. Bestill med USBasp i samme slengen så kan du laste den firmwaren du vil også.
God jul btw:)
Bruker HK kk- kortet V2 med flasha v 4.7, den porsessen gikk fint med USBasp dongelen. Problemet er nå LØST, nøkkelordet for løsningen er at jeg ikke hadde fått med meg at i v 4,7 er roll, pitch og yaw potmeterne byttet ut med PID (søk på google). Roll er blitt P, pitch er blitt I og yaw er blitt PI. Etter at jeg leste meg litt opp på dette med PID var ikke motor 4 noe problem lengre, enetse nå er å få reversert yaw gyroen når batteriene er ladet igjen. Dette med PID kunne vel nrkBeta skrivd litt om i artikklen, om dere har fått testet v4.7
Les her om PID tuning: rcgroups.com/forums/showthread.php?t=1375728
nå var jo alt alt på plass, trodde jeg, men jeg hadde rota og bestilt feil propeller, så alle er rigga samme vei. i tillegg mangler jeg kabler for å koble sammen radiomottaker med kk-kortet. Sistnevnte finner jeg nok på ELFA i sandakerveien, men er det noen som vet om et sted i Oslo som kan ha propeller? Jeg har bestilt flere fra dealextreme, men har ikke lyst til å vente…..
roy
Erre mulig – her finner jeg modellflynytt.no og radiostyrt.no, etter hva jeg kan se to separate forum styrt av samme person (hva er poenget?), med CAPTCHAer overalt, og med påkrevd manuell godkjenning før en kan stille spørsmål om noe som helst… Er det noen her som vet om et godt, gjerne norsk, og forhåpentligvis litt mer åpent sted enn disse her?
roy
Det er en del forum der man må godkjennes før man kan poste første gangen. Dette er for å kutte ned på spam. Vet ikke om det gjelder på de forumene du nevner. Vet ikke om noen andre forumer.
joda, jeg kjenner til dette, men kombinasjonen overdrevent bruk av CAPTCHAer og så manuell godkjenning på toppen, vitner om at det kanskje burde ha vært bedre mekanismer i sving…
Hei Roy! Hvis du ikke har vært på disse forumene før så er det kanskje ikke rart at du ikke har fått med deg grunnen. Det er som Stig sier at det har vært mye spam men også svært dårlig ordbruk blant enkelte og enkelte emner. Derfor modereres det kraftig til tider på de nevnte forum. Jeg skjønner hvorfor og er faktisk enig i de avgjørelsene de gjør der. Har ikke opplevd «manuell godkjenning» av hva jeg har skrevet og postet der.
Vi er en gruppe elever ved Måløy Videregående skole, som har et prosjekt på gang. Vi skal bygge et RC beltekjøretøy. Det skal være ganske stort ca. 120cm x 80cm. Noe som ligner på dette: youtube.com/user/gedhage#p/u/13/xjBNjKJQthY I den anledning lurte vi på om det var noen som hadde tips til hvor vi kan skaffe en relativt liten likestrømsmotor med en effekt på 500 – 1500w
Hva med motorer beregnet på el-sykler og lignende? De finnes fra 500w og oppover, og burde være mer enn kraftige nok. Du må jo dessuten ha en til hvert belte.
Sjekk goldenmotor.com/ – under BLDC motor finner du mye forskjellig.
Blix
Har du sett på Hobbyking.com? Og hvor «små» vil du de skal være?
Står i del 1 at «Du trenger to høyreroterende og to venstreroterende.»
Men finner ingen steder hvor man skal ha de forskjellige..
Har satt opp motoer 1og4 til å gå motsatt vei av 2 og 3 (som tegningen viser)
Skal man fortsatt ha ulike propeller?
Kanskje litt dårlig forklart ja. Tegningen viser jo bare hvilken vei motorene skal gå. Men: propellene skal være av to forksjellige typer: CW (clockwise) og CCW (counter clockwise). Og de skal monteres slik som vist på tegningen. CW-propellene der pilen går med klokken og CCW-propellene der pilen går mot klokken.
Ofte er propellene som skal gå samme vei som klokken merket med en «R». Og de som går mot klokken er ikke merket med noe annet enn dimensjonene.
Mine propeller heter derfor 10×4.5 og 10×4.5R.
Haha, jeg kjøpe riktige propeller (de som ble anbefalt), men hadde glemt at ikke alle var like…
Sjekket nå og jeg har helt tilfeldig satt riktig propell på alle motorene!
Flaks! (6.25% sannsynlighet!)
vel… det er vel en god del høyere sjanse enn 6,25% – du har bare to typer propeller, ikke 4…
Du har 50% sjanse for å velge rett for 4 motorer.. 0.5^4 = 6.25%…
Om du har fire propeller, to høyrepropeller (H) og to venstrepropeller (V), og disse skal monteres på fire motorer, så har du nok ikke 16 muligheter totalt…
Da har jeg og min far satt sammen helikopteret.
Vi tok en liten test i stua, men fant fort ut at propellene ikke satt ordentlig fast.
Speedet på til det nesten lettet, så gikk en av propellene rett opp i luften. Skal ikke «propsaveren» festet på andre måter enn å skru inn de 2 skruene hardt mot motorpinnen? Virker ikke helt som en sikker løsning når man speeder på fort.
Kan se ut som skruene ikke var skrudd godt nok i mot motorpinnen. 🙂
Det er bare skruene som må trekkes til skikkelig hardt. Vi har også opplevd den klassiske «en-propell-tar-av-for-seg-selv»-greien. Både på bakken og i luften. Sistnevnte er veldig ugunstig…
Så: stram alle skruer skikkelig før hver flytur.
Og for dere som velger å ta av inne i huset: dette er IKKE å anbefale med mindre du har et stort hus. Dette er krafige farkoster og propellene blir direkte farlige når de går på full hastighet. Så hold dere på god avstand når dere flyr!
Jepp, var ikke så ille at vi tok en kjøretur inne i stua. Bare sjekke at alt fungerte osv. Hjalp når jeg brukte et annet skruhjern som var hakket større. Sitter som fjell nå 🙂
Da fikk jeg den første motoren i posten, det kraftigere og tyngre alternativet som ble anbefalt i del 1. hobbyking.com/hobbyking/store/__16229__NTM_Prop_Drive_Series_28_30A_750kv_140w.html
Først nå la jeg merke til at akselen til motoren stikker ut på samme side som ledningene. Altså må man feste motoren på «oversiden». Noen tips til hvordan jeg skal gjøre dette på en elegant måte?
Du har ihvertfall to muligheter. Enten bruker du hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=16719 NTM Prop Drive 28 Series Accessory Pack og lager et hull i ramma til akslingen (det har jeg gjort), ellers så kan du bruke hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=19007 H35 Standoff Motor Mount og montere motorene «normal» vei. Dersom du bruker Standoff Mounts, kan du bruke prop-savers, men det passer ikke på Accessory Pack.
Kan du poste et bilde av hvordan det ser ut når du har benyttet denne motoren slik du har gjort?
Det kunne jeg gjort hadde jeg ikke akkurat dratt på jobb og ikke kommer hjem før i midten av januar…
Da har jeg omsider kommet meg hjem fra jobb og har tatt et bilde som viser to av måtene å montere NTM 28-30. Motoren til venstre henger litt for langt ned fordi jeg hadde ikke korte nok skruer til å feste den ordentlig og ramma er bare festet til armen med tape.
I tillegg til at det kan være kjekt å kjøpe noen ekstra motorer, har jeg funnet ut at det kan være kjekt å kjøpe noen ekstra accessory pack. Propellakslingen på det ene festet mitt var ganske usentrert. Heldigvis har jeg flere i bestilling. Har også tenkt å lage et tricopter, så får jeg se hvordan det blir… 🙂
Link til bilde
imageshack.us/photo/my-images/818/img0458zy.jpg/
Hei.
Nå er det like før jeg gir opp dette prosjektet.
Alt er koblet sammen og snurrer og går, men det ser ut som om motorene ikke går med samme hastighet.
Jeg bruker Turnigy Plush 25A ESC’er og KK Quad X4.7 kontroller, altså i X-konfig. Jeg har lest noe om at ESC’ene må kalibreres, men skjønner ikke helt hvordan det skal gjøres. Skal de kalibreres en og en koblet direkte til mottaker, uten kontrollerkortet tilkoblet, og hvordan blir dette når det er i X-konfig?
Noen som har tips?
Hilsen
Øyvind
Syntes ikke du skal gi opp! Det er ikke langt igjen nå.
ESC-ene må kalibreres. Og det gjøres som beskrevet i artikkelen:
-Skru Yaw-pot til null (helt mot venstre).
-Slå på fjernkontrollen.
-Dra throttle helt til maks.
-Koble på batteri (slik at KK-kortet får strøm).
-Vent til motorene piper to ganger etter at de er ferdige med sine innledende pipelyder.
-Dra throttle helt ned. Da skal motorene pipe igjen.
-Trekk ut batteriet igjen.
-Skru Yaw-pot tilbake til maks.
Dette er uavhengig av om du kjører X-konfig eller +-konfig.
Hei, og takk for tilbakemelding.
Jeg har allerede prøvd dette flere ganger.
Etter at batteriet er koblet til med throttle på max og yaw pot på min så kommer den vanlige melodien: «pip-pip-pip—-piip-piip-piip—-piiiip».
Etter det blir det stilt, og det kommer ikke to pip som indikerer at throttle skal draes helt ned. Hva kan det være jeg gjør feil?
Øyvind
Her er en video som viser prosessen. Det er ikke så nøye at fyren snakker russisk. Han viser ganske tydelig hvordan det hele foregår: vimeo.com/23193817
Om du fremdeles sliter kan kanskje et programmeringskort hjelpe deg? Se min kommentar til Roy Sigurd Karlsbakk lenger nede.
Vil bare nevne at om man har Mode 1 kontroll, så er det ikke Throttel som skal skrues ned til høyre, men Elevator. Forsatt venstre spak, som vist på bildet da. 🙂
Det er ikke riktig. Det er throttle (gass) og rudder (sideror) som skal brukes til dette, uavhengig av hvor de er plassert på senderen.
Hva er best ut av et tricopter eller en quad? hvorfor? hva er lettest og fly med? hva er forskjellene, foruten at den har 3 motorer da?
Et quadcopter er lettere å bygge (fordi du ikke trenger servomekanismen til den bakre motoren). Et quadcopter kan også bygges kraftigere med mer løftekraft fordi du har fire motorer.
Et tricopter er lettere å orientere i luften fordi det er større forskjell på hva som er bakover og hva som er fremover. Tricopteret trenger ikke to forskjellige typer propeller.
…men her er det nok mange meninger og preferanser der ute. I noen diskusjoner virker det nesten som om det er to forskjellige leire. Quad-folkene og Tri-folkene…
hrmf… nå er alt koblet, etter hva jeg kan se også riktig, kontrollerern armerer seg, men samtlige ESC-er piper do-re-mi (pause 1,5s eller så) og så pip-pip-pip-pip-pip….. (samme tone som «do» i do-re-mi først) uten stopp
roy
Jeg fikk det samme problemet da jeg skulle teste min quad med CopterControl-kortet mitt første gang. Den kom med samme pipende innledning og så uendelig pip-pip-pip…
Problemet er at quad’en tror at throttle ikke er satt til null. Tror det er en sikkerhetsmekanisme i ESC’ene. For at du ikke skal risikere full fart på propellene når du setter i strømmen.
Jeg brukte timesvis på å prøve å kalibrere ESC’ene slik det står beskrevet i bruksanvisningen. Masse voodo med fjernkontrollen og forskjellige melodier. Fikk det ikke til.
Så satte jeg KK-kortet tilbake i Quad’en og kjørte throttle-range-kalibrering en gang til med kortet. (Yaw-pot til null osv).
Når jeg så satte i OpenPilot-kortet igjen fungerte det plutselig.
Jeg har med andre ord hatt suksess med denne kalibreringen fra KK-kortet stort sett hver gang. Men ser at folk også bruker spesielle programmeringskort for å sette opp ESC’ene. For eksempel dette: hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=2169&aff=61689
Kanskje det kan hjelpe?
Det er jo for kjipt om vi har flere her som har bygget helt ferdig men gir opp fordi de siste detaljene ikke kommer på plass…
Hei!
Prøv å trimme trottelen helt ned. Det hjelpte meg.
Takk for en interessant og lærerik artikkelserie! Da har jeg endelig mottatt det meste som trengs for å bygge et quadcopter.
Jeg sliter imidlertid litt med å få tak i furulister i riktig størrelse. De fleste stedene jeg har lett har de bare lister som er for tykke. Det må da finnes noen fysiske butikker i Oslo/Osloområdet som har furulister i riktig størrelse (15x15mm og/eller 10x10mm), slik at jeg ikke behøver å bestille det og få det tilsendt med Posten? Hvor har NRKBeta og NRKBetas lesere fra Oslo fått tak i sine lister og finerplater?
Jeg kjøpte 12×12 og finerplater hos Maxbo på Vækerø. 15×15 tror jeg blir litt tungt. Maxbo hadde ikke 10×10 da jeg var innom, men ellers er sikkert det også helt fint.
Sjekk nøye for kvist og unøyaktigheter.
Strålende!
Jeg var en tur innom Maxbo på Alna for noen uker siden, men da lette jeg sikkert bare på feil sted (hvis det ikke var midlertidig utsolgt eller noe slikt). Jeg får ta en tur til og se.
Jeg kjøpte cirka 50x50cm på maxbo og saga opp resten sjøl. De skulle ha 30 kroner eller så for jobben å kappe, men tok ikke noe for fjøla.
Det står 15×15 i handlelista 🙂
Det har du rett i! Takk for påminnelse.
Vi har testet mye forskjellig. Den aller mest stabile riggen vi flyr nå er faktisk 15×12. Men må innrømme at etter MYE krasjing med en av riggene som er 12×12 uten antydning til svikt i armene, så kan vi anbefale det også. Og til og med 10×10 om du føler deg dristig.
Jeg har nå oppdatert artikkelen med denne informasjonen.
Og for dem som har kjøpt 15×15: det flyr helt fint! Det er solid og gir enda bedre støtte til motorene enn 12×12.
Har du prøvd SmallSize på Lilletorget eller i Skovvn? De har jo kvalitetene man trenger for modellbygging.
Tips: Lim og skru sammen to eller flere tynnere lister, det blir langt mer stabilt!
Blix
Hei
Takk for en flott artikkel serie håper det kommer mer har endeligt fått alle delene. Ser at du har gått over til OpenPilot-kort fra KK-kort,er dette et betre kort (enklere) å fly med for en novice?
Vi har lyst til å teste forskjellige kort. OpenPilot har aksellerometer i tillegg til gyroer. Noe som gir enda bedre stabilisering. Så det er et hakk lettere å fly ja. Men det koster 95 euro i stedet for 24 dollar. Og så er det nesten alltid utsolgt.
Et alternativ som også har aksellerometer er de relativt billige MultiWii-kortene som har kommet på markedet: goodluckbuy.com/mwc-multiwii-se-standard-edition-4-axis-flight-control-board-quadx-w-ftdi-basic-brea…
…men disse har ikke vi noen erfaring med ennå.
Vil fremdeles anbefale å begynne med et KK-kort fra hobbyking. Det er billig, skal være ganske enkelt å sette opp og gir deg en god følelse av hvordan det er å fly Quad.
Takk for hurtig svar,jeg har kjøpt inn KK-kortet så jeg kommer til å starte med det får prøve hvor vanskelig det er.Jeg flyr simulator med GUI 330 det fungerer bra så det skal bli gøy å prøve prosjektet
Bruker HK kk- kortet V2 med flasha v 4.7, den porsessen gikk fint med USBasp dongelen. Problemet er nå LØST, nøkkelordet for løsningen er at jeg ikke hadde fått med meg at i v 4,7 er roll, pitch og yaw potmeterne byttet ut med PID (søk på google). Roll er blitt P, pitch er blitt I og yaw er blitt PI. Etter at jeg leste meg litt opp på dette med PID var ikke motor 4 noe problem lengre, enetse nå er å få reversert yaw gyroen når batteriene er ladet igjen. Dette med PID kunne vel nrkBeta skrivd litt om i artikklen, om dere har fått testet v4.7
Les her om PID tuning: rcgroups.com/forums/showthread.php?t=1375728
Hei,
Eg har nett bygd meg eit Quadrokopter basert på byggebeskrivelsen i nrkbeta. Ein glimrande byggebeskrivelse spør de meg. Takk nrkbeta. Mitt problem er at eg testa quadrokopteret for første gang i dag etter at det var komplett ferdig. Alt fungerte glimrande. Hovra fint og roleg ein meter over bakken etter litt justeringar. Så skulle eg vise fram prosjektet for nokon i RCklubben ein time seinare og då fekk eg ikkje liv i KK kortet. Det er eit lite raudt blink i LED lyset med det same eg koblar på batteriet og deretter er det daudt. Kva kan dette skuldast? Har sjekka på kryss og tvers om det er dårleg kontakt nokon plass utan å finne noko.
Fann ut av problemet på eigen hand. Det var berre ein banal feil.
Det kan sikkert være fint om du skriver hva som førte til dette, selv om det var så banalt at du syns det er flaut kan sikkert andre komme opp i samme situasjon
Javel då. Det som var feilen var at eg hadde bytta om på kva retning motorane skulle rotere. To roterte den eine vegen og to den andre men dei skulle vere motsatt. Helikopteret letta for eg hadde montert propellane rett i høve rotasjon, men då eg testa det første gongen såg eg at ror-retning var feil så eg reverserte dette på radioen. KK kortet gjekk då i vranglås og eg fekk det ikkje til å virke slik det gjorde før dette vart gjort. Fann feilen på grunn av den detaljerte byggebeskrivelsen.
Jeg ser at stort sett alle flasher kk-kortet for å få X-konfigurasjon på quad’en sin. Jeg skjønner jo at det ser mye tøffere ut, men er det noen som har gjort sammenlignende tester på X og + flyvning?
Jeg skulle likt å vite hva forskjellene i flygekarakterestikker er.
Hvem flyr fortest?
Må både X og + tilte like mye for å fly fremover?
I teorien burde + bruke litt lenger tid på å tilte, betyr det at den vil bruke lenger tid på en oppbremsning fra full fart forover til stillstand?
Kan noen av de tilte for mye slik at quad’en flipper rundt og går i bakken?
Er det i det hele tatt noen som kan fortelle meg hvilke forskjeller det er på flyvningen til de to konfigurasjonene.
Alle detaljer og synspunkt av interesse. Har lyst til å fly rundt med kamera og er vil gjerne ha en så smooth og vannrett tur som mulig.
Og en ting til. Karlsbakk: Har du laget noen sånne kort selv? I så fall er jeg interessert i å kjøpe fra deg, man må jo støtte opp om lokalt initiativ 🙂
Har ikke fått laga noen sånne (ennå). Jeg spurte i en tråd på forums.openpilot.org/topic/7469-eta-for-cc-hardware/ om tilgjengelighet og eventuelt hvordan de stilte seg til at noen laga nye og ble flama ut på vidda – ser ut som om det er en og annen hårsår person der inne… Der står det uansett at nye kommer om «et par uker» regna fra slutten av november, selv om EU-sjappa fremdeles lister dem som ute av lager.
Om det ikke skjer noe snart, vil jeg sjekke mer på jobb hva som skal til for å lage et slikt 4-lagskort – vi har en og annen der som er rimelig oppegående på elektronikksida (der jeg mangler endel) og kan tegne et nytt kort om nødvendig (jf lisenser osv).
roy
Vet ikke om jeg vil være helt enig i at du ble flama helt ut på vidda av noen hårsåre personer. Det blir gjerne slik når man ikke leser helt hva som blir sagt og hva som er sagt flere ganger tidligere og terper på det samme om igjen og om igjen… 🙂
Når det gjelder email-varsel, så skjedde det samme for noen måneder siden også når det kom inn kort. Tror man egentlig bare må følge med på forumet og se når det kommer inn kort igjen istedenfor å stole på email-varselet.
Får vel sørge fo